- 33 -
UniversitéBadji-Mokhtar
Éléments de mécanique
Introduction aux RI
2.
- 34 -
Objectifs de la robotisation
Historique
Définitions
Classification
Caractéristiques des RI
Introduction aux RI
3.
- 35 -
Objectifsde la robotisation
Facteurs économiques
• Réduction des coûts de main-d'oeuvre
• Flexibilité de la gestion de production
• Amélioration de la qualité
Facteurs humains
• Augmentation de la sécurité sur le poste de travail
• Évolutions des fonctions des opérateurs (nouveaux métiers)
Facteurs environnementaux
• Réduction des coûts énergétiques
4.
- 36 -
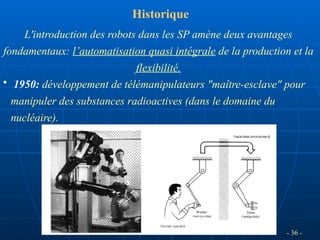
L'introductiondes robots dans les SP amène deux avantages
fondamentaux: l’automatisation quasi intégrale de la production et la
flexibilité.
• 1950: développement de télémanipulateurs "maître-esclave" pour
manipuler des substances radioactives (dans le domaine du
nucléaire).
Historique
5.
- 37 -
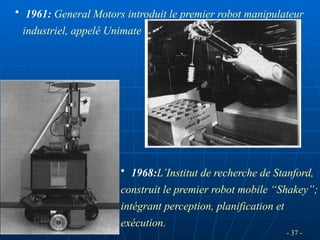
•1961: General Motors introduit le premier robot manipulateur
industriel, appelé Unimate
• 1968:L’Institut de recherche de Stanford,
construit le premier robot mobile “Shakey”;
intégrant perception, planification et
exécution.
6.
- 38 -
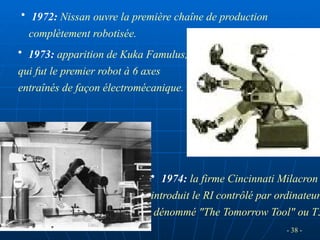
•1972: Nissan ouvre la première chaîne de production
complètement robotisée.
• 1974: la firme Cincinnati Milacron
introduit le RI contrôlé par ordinateur
dénommé "The Tomorrow Tool" ou T3
• 1973: apparition de Kuka Famulus,
qui fut le premier robot à 6 axes
entraînés de façon électromécanique.
7.
- 39 -
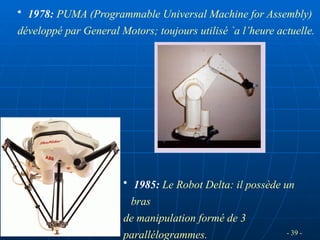
•1978: PUMA (Programmable Universal Machine for Assembly)
développé par General Motors; toujours utilisé `a l’heure actuelle.
• 1985: Le Robot Delta: il possède un
bras
de manipulation formé de 3
parallélogrammes.
8.
- 40 -
•Robot Industriel (RI):
Définition de la JIRA (Japan Industrial Robot Association):
Elle, met plus l’accent sur la notion d’anthropomorphisme en
donnant comme définition (1980): "Dispositif versatile et flexible
offrant des fonctions de déplacement similaires à celles des
membres humains ou dont les fonctions de déplacement sont
commandées par ses capteurs et ses moyens de reconnaissance".
Définition de la RIA (Robotic Industries Association) au USA:
Elle insiste sur l’utilisation en proposant (1979): "Manipulateur
multifonction reprogrammable conçu pour déplacer des
matériaux, des pièces, des outils ou des dispositifs spécialisés au
travers de déplacements variables et programmables pour
accomplir diverses tâches".
9.
- 41 -
Définition de L’AFRI (Association française de robotique industrielle)
o le manipulateur: Mécanisme généralement composé d’éléments en
série, articulés ou coulissants l’un par rapport à l’autre, dont le but
est la saisie et le déplacement d’objets suivant plusieurs degrés de
liberté. Il est multifonctionnel et peut être commandé directement
par un opérateur humain ou par tout système logique.
o le robot industriel: Manipulateur automatique, asservi en position,
reprogrammable, polyvalent, capable de positionner et d’orienter
des matériaux, pièces, outils ou dispositifs spécialisés au cours de
mouvements variables et programmés pour l’exécution de tâches
variées. Il se présente souvent sous la forme d’un ou plusieurs bras
se terminant par un poignet. Son unité de commande utilise,
notamment, un dispositif de mémoire et éventuellement de
perception de l’environnement.
10.
- 42 -
•Classification de la JIRA: Les RI sont répartis en six classes:
Classe 1: groupe les manipulateurs manuels (actionnés par
l’homme); on y trouvera donc, en particulier, tous les
télémanipulateurs mécaniques ou électromécaniques.
Classe 2: elle comporte les manipulateurs automatiques à
séquence fixe qui exécutent des mouvements immuables, chaque
articulation allant d’une butée à l’autre, dans un ordre et un sens
préétablis et non modifiables de manière simple.
Classe 3: elle rassemble les manipulateurs à séquence variable,
ce qui signifie que l’ordre, le sens et l’amplitude de déplacement
des articulations sont aisément réglables ou programmables.
Classification
11.
- 43 -
Classe 4: on y trouve les robots playback qui peuvent effectuer des
trajectoires continues. L’opérateur, dans une phase d’apprentissage,
fait exécuter la tâche au robot en le pilotant manuellement ou
depuis une console de commande. L’information utile est
enregistrée et rappelée lorsque c’est nécessaire. Le robot exécute
alors seul la tâche autant de fois qu’on le désire.
Classe 5: c’est le domaine des robots à commande numérique.
L’opérateur humain fournit au robot un programme de déplacement
(il ne guide plus le robot manuellement, comme précédemment en
phase d’apprentissage).
Classe 6: elle englobe tous les robots dits intelligents, dotés de
moyens de détection de l’environnement (et capables d’adapter ou
de modifier eux-mêmes leur comportement pour assurer le succès
d’une tâche, en dépit des variations des conditions d’exécution).
12.
• Classification dela RIA: Elle est strictement identique à celle de la
JIRA, si l’on excepte l’importante nuance suivante. Les trois
premières classes de la JIRA ont trait à des manipulateurs que les
Américains ne reconnaissaient pas en tant que robots.
• Classification de l'AFRI: groupe les robots en quatre catégories:
Classe A "MANIPULATEURS MANUELS": Engin de
manipulation commandé par l’homme et ayant au moins quatre
degrés de liberté.
Classe B "MANIPULATEUR AUTOMATIQUE": Engin de
manipulation multiaxe non asservi, à cycle automatique (à séquence
fixe ou à séquence variable).
Classe C "ROBOT PROGRAMMABLE": Engin de manipulation de
3 axes ou plus, asservi de manière continue ou point à point;
programmable par apprentissage et/ou par langage symbolique.
13.
- 45 -
Classe D "ROBOT DIT INTELLIGENT": Manipulateur
automatique asservi capable d’analyser les modifications de son
environnement et de réagir en conséquence (à l’exclusion des
modifications triviales données par les capteurs tout ou rien).
• Autres classifications:
Classification fonctionnelle (selon la tâche réalisée): Soudage,
Peinture, Assemblage, Emballage et palettisation, etc.
Classification chronologique (ou selon l'évolution
technologique)
o RI de 1ère génération (ou automates) ils réalisent des
tâches répétitives sur des chaînes de montages.
o RI de 2ème génération munis de capteurs, ils peuvent
réagir à leur environnement.
o RI de 3ème génération dotés d'IA.
14.
- 46 -
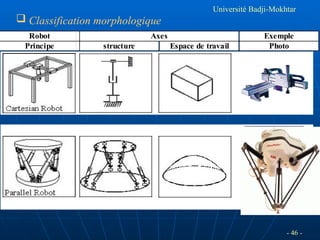
Classification morphologique
Robot Axes Exemple
Principe structure Espace de travail Photo
Université Badji-Mokhtar
15.
- 47 -
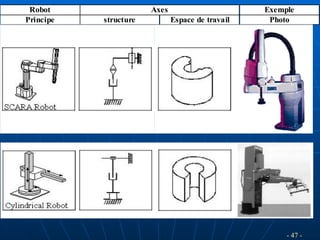
RobotAxes Exemple
Principe structure Espace de travail Photo
16.
Objectifs dela robotisation
Historique
Définitions
Classification
Caractéristiques des RI
Introduction aux RI
17.
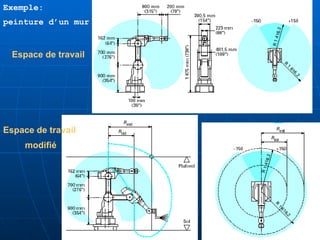
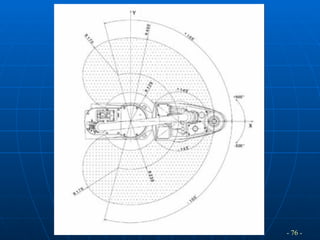
Espace detravail (ou Volume de travail) [Workspace]
Il est défini comme l'ensemble des points atteignables par l'organe
terminal.
o Espace de travail maximal [Reachable Workspace]: c'est le
volume de l'espace que le robot peut atteindre via au moins une
orientation.
o Espace de travail dextre (ou habile) [Dexterous Workspace]:
c'est le volume de l'espace que le robot peut atteindre avec toutes
les orientations possibles de l'organe terminal.
L'espace de travail habile est donc un sous-ensemble de
l'espace de travail maximal.
o Espace de travail modifié: c'est l'espace de travail pour une
tâche particulière, avec un outil particulier.
Caractéristiques (ou Performances) des RI
• Les performances-tâches:
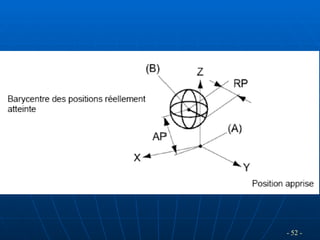
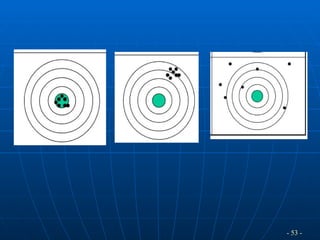
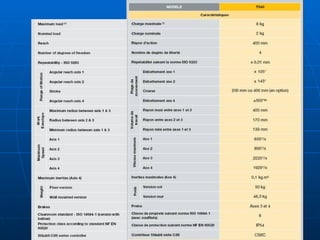
Exactitude (ouPrécision) et Répétabilité de position
o Exactitude de position [Position Accuracy (AP)]:
Elle caractérise l’aptitude du robot à situer l’organe terminal
en conformité avec la situation programmée. Elle exprime
l'écart entre une pose commandée et la moyenne des poses
atteintes.
o Répétabilité de position [Position Repeatability (RP)]:
Elle exprime l'écart entre les positions et orientations des poses
atteintes pour la même pose commandée, répétée n fois. C'est le
paramètre adapté lorsque l'on considère des cycles répétitifs
avec une programmation par apprentissage.
Le degré de liberté (ddl): il est caractérisé par le nombre de
mouvements possibles et indépendants de l’organe terminal..
- 54 -
Exactitude (ou Précision) et Répétabilité de trajectoire
o Exactitude de trajectoire [Trajectory Accuracy (AT)]:
o Répétabilité de trajectoire [Trajectory Repeatability (RT)]:
23.
La vitessemaximale: Il s'agit de la vitesse maximale de translation
ou de rotation de chaque axe du robot. Certains constructeurs
donnent la vitesse maximale en bout de bras, dans la condition la
plus favorable.
L'accélération maximale: Elle est donnée pour chaque axe du robot
dans la configuration la plus défavorable (inertie maximale, charge
maximale).
L'agilité: c'est la propriété de se déplacer d'une configuration à une
autre dans l'espace de travail. Elle dépend de la vitesse maximale, de
l'accélération maximale, etc.).
Résolution: C'est le plus petit écart entre la situation initiale A
et la situation programmée B qui puisse se traduire par une
modification réelle de la situation de l’organe terminal,(i.e. qui
entraîne un déplacement de celui-ci.
24.
- 56 -
La capacité de charge [Maximum load capacity]: c'est la charge
maximale que peut porter et manipuler le robot dans la
configuration la plus favorable. Elle varie de quelques centaines de
grammes jusqu'à 100 kg.
La charge utile [Nominal load capacity]: C'est la charge maximale
que peut porter le robot sans dégrader la répétabilité et les
performances dynamiques quelque soit la position. Elle est
nettement inférieure à la charge maximale.
25.
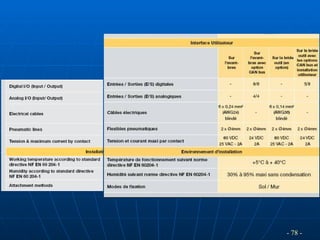
- 57 -
Les possibilités de synchronisation avec d’autres machines
La source d'alimentation [Power source]: elle permet de savoir
la source d'alimentation nécessaire pour faire fonctionner le
robot. Plus le robot est fort, plus il aura besoin de courant pour
fonctionner correctement.
• Les performances-homme: On entend par là la facilité d’utilisation
du robot par un opérateur non spécialiste.
• Les performances-économiques Il s’agit essentiellement de la
rentabilité d’utilisation de robots dans l’entreprise.
La fiabilité: elle sera définie par un taux de pannes
26.
- 58 -
UniversitéBadji-Mokhtar
Éléments de mécanique
Introduction aux RI
Architecture d'un Robot Industriel Articulé (RIA)
27.
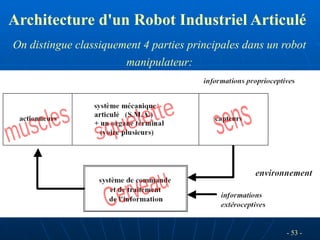
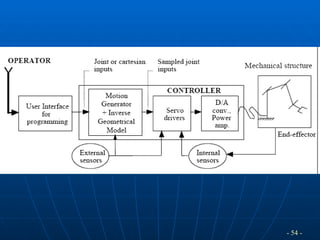
On distingue classiquement4 parties principales dans un robot
manipulateur:
Architecture d'un Robot Industriel Articulé
- 53 -
Les capteurs:ces les organes de perception. Ils sont dits
proprioceptifs lorsqu'ils mesurent l'état interne du robot
(positions et vitesses des articulations) et extéroceptifs lorsqu'ils
recueillent des informations sur l'environnement (détection de
présence, de contact, mesure de distance, vision artificielle).
Les actionneurs (ou actuateurs): tout dispositif
générateur d’effort à vitesse variable qui fait mouvoir les
articulations du robot. Ils peuvent être pneumatiques,
hydrauliques, ou électroniques.
Le système de commande: synthétise les consignes des
asservissements pilotant les actionneurs, à partir de la fonction
de perception et des ordres de l'utilisateur.
30.
Le SMA:Une chaîne cinématique de segments (links)
généralement rigides assemblés par des liaisons (joints) pour
obtenir un mouvement relatif de segments voisins. Dans
Cette structure On peut distinguer les sous-ensembles
suivants:
La base (corps extrême): qui est fixée au sol ou sur un
véhicule.
Le porteur: dont le rôle est d'amener l’organe terminal dans
une situation (position et orientation) donnée selon des
caractéristiques de vitesse et d’accélération données.
Le poignet: il est destiné à l'orientation de l'organe terminal.
L'organe terminal (corps extrême): qui porte l'outil
"effecteur" (Pince, préhenseur, porte-instrument, etc.).
- 56 -
31.
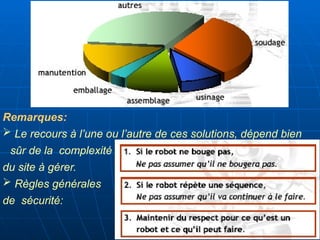
Remarques:
• Les positionsrelatives des segments
voisins sont mesurées par des capteurs de
position attachés à chaque articulation.
• Les articulations peuvent être
motorisés (actives) ou non (articulations
passives).
• La partie interface avec l'opérateur
permet la programmation du RI par
apprentissage ou par PHL (Programmation
Hors-Ligne).
- 58 -
32.
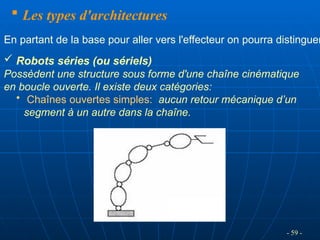
Les typesd'architectures
Robots séries (ou sériels)
Possèdent une structure sous forme d'une chaîne cinématique
en boucle ouverte. Il existe deux catégories:
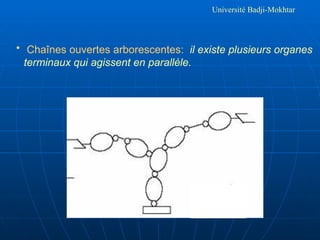
• Chaînes ouvertes simples: aucun retour mécanique d’un
segment à un autre dans la chaîne.
En partant de la base pour aller vers l'effecteur on pourra distinguer
- 59 -
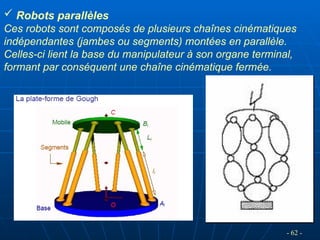
Robots parallèles
Cesrobots sont composés de plusieurs chaînes cinématiques
indépendantes (jambes ou segments) montées en parallèle.
Celles-ci lient la base du manipulateur à son organe terminal,
formant par conséquent une chaîne cinématique fermée.
- 62 -
Université Badji-Mokhtar
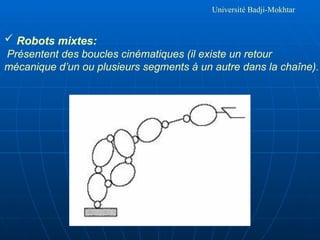
Robotsmixtes:
Présentent des boucles cinématiques (il existe un retour
mécanique d’un ou plusieurs segments à un autre dans la chaîne).
- 66 -
UniversitéBadji-Mokhtar
Éléments de mécanique
Introduction aux RI
Architecture d'un Robot Industriel Articulé (RIA)
Les robots séries simples
40.
Université Badji-Mokhtar
Les robotsséries simples
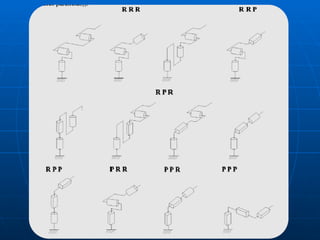
Afin de dénombrer les différentes architectures possibles d'une
chaîne ouverte simple à trois articulations, on ne considère que
deux paramètres:
• Le type d’articulation (ar): Rotoïde ou Prismatique
• L’angle (q) que font deux axes articulaires consécutifs: 0°
ou 90°.
Il en résulte 12 Structures possibles du porteur. ces structures
sont non redondantes (i.e le NDL de l’organe terminal est ≥ au
nombre d’articulations motorisées "NDL espace articulaire").
- 67 -
42.
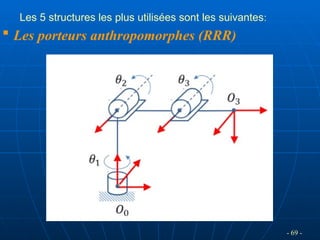
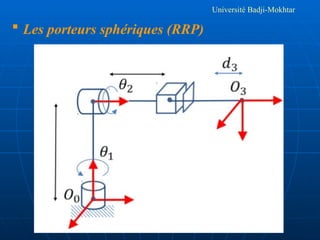
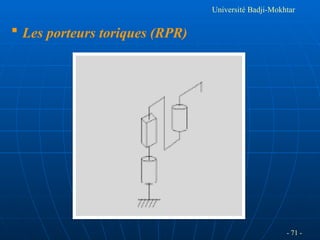
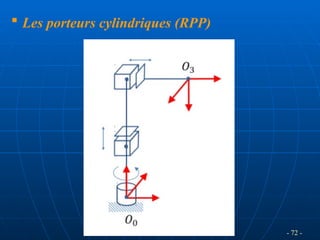
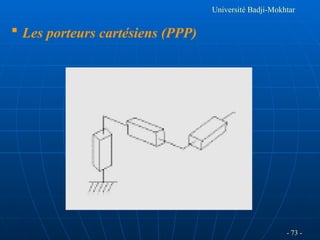
Les 5 structuresles plus utilisées sont les suivantes:
Les porteurs anthropomorphes (RRR)
- 69 -
- 74 -
UniversitéBadji-Mokhtar
Éléments de mécanique
Introduction aux RI
Architecture d'un Robot Industriel Articulé (RIA)
Les robots séries simples
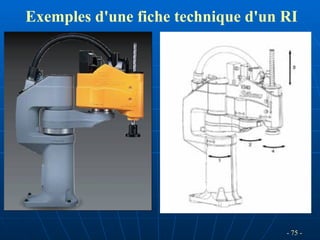
Exemples de fiches techniques d'un RIA
- 79 -
UniversitéBadji-Mokhtar
Éléments de mécanique
Introduction aux RI
Architecture d'un Robot Industriel Articulé (RIA)
Les robots séries simples
Exemples de fiches techniques d'un RIA
Applications et critères de choix
53.
Les RI voisinentavec d’autres machines automatiques, des dispositifs
d’amenée et d’évacuation des pièces, etc. Leur intégration dans le SP
peut s’effectuer de multiples façons entre les deux exemples extrêmes
suivants:
• Le RI est considéré comme une machine parmi d’autres, pilotée
comme l’ensemble des équipements par un automatisme externe,
local et/ou centralisé
• L’intelligence de la partie
commande du RI est utilisée
pour piloter en plus les outils
associés, voir les autres
équipements de la cellule
de production.
Applications et critères de choix
54.
- 81 -
Lechoix d'un type de RI est un est processus critique. Les
principales étapes de ce processus sont les suivantes:
• Identifier l'application: palettisation, soudure, etc.
• Choisir votre marque de robot en fonction du prix et de
critères de service: proximité du bureau de service,
disponibilité des techniciens, coût de logiciel de simulation
et de programmation.
• Sélectionner en fonction des caractéristiques du robot:
charge utile, répétabilité, enveloppe de travail, poids,
dimensions, etc.
• Valider le tout avec des simulations 3D, ainsi que des
simulations des mouvements afin de garantir les cadences
de production requises.
Processus de sélection de Robots Industriels

![ Espace de travail (ou Volume de travail) [Workspace]
Il est défini comme l'ensemble des points atteignables par l'organe
terminal.
o Espace de travail maximal [Reachable Workspace]: c'est le
volume de l'espace que le robot peut atteindre via au moins une
orientation.
o Espace de travail dextre (ou habile) [Dexterous Workspace]:
c'est le volume de l'espace que le robot peut atteindre avec toutes
les orientations possibles de l'organe terminal.
L'espace de travail habile est donc un sous-ensemble de
l'espace de travail maximal.
o Espace de travail modifié: c'est l'espace de travail pour une
tâche particulière, avec un outil particulier.
Caractéristiques (ou Performances) des RI
• Les performances-tâches:](https://image.slidesharecdn.com/introduction-robotique-les-ri-2021-2022-250915191637-9639c3bb/85/Introduction-Robotique-Les-RI-2021-2022-ppsx-17-320.jpg)
![ Exactitude (ou Précision) et Répétabilité de position
o Exactitude de position [Position Accuracy (AP)]:
Elle caractérise l’aptitude du robot à situer l’organe terminal
en conformité avec la situation programmée. Elle exprime
l'écart entre une pose commandée et la moyenne des poses
atteintes.
o Répétabilité de position [Position Repeatability (RP)]:
Elle exprime l'écart entre les positions et orientations des poses
atteintes pour la même pose commandée, répétée n fois. C'est le
paramètre adapté lorsque l'on considère des cycles répétitifs
avec une programmation par apprentissage.
Le degré de liberté (ddl): il est caractérisé par le nombre de
mouvements possibles et indépendants de l’organe terminal..](https://image.slidesharecdn.com/introduction-robotique-les-ri-2021-2022-250915191637-9639c3bb/85/Introduction-Robotique-Les-RI-2021-2022-ppsx-19-320.jpg)
![- 54 -
Exactitude (ou Précision) et Répétabilité de trajectoire
o Exactitude de trajectoire [Trajectory Accuracy (AT)]:
o Répétabilité de trajectoire [Trajectory Repeatability (RT)]:](https://image.slidesharecdn.com/introduction-robotique-les-ri-2021-2022-250915191637-9639c3bb/85/Introduction-Robotique-Les-RI-2021-2022-ppsx-22-320.jpg)
![- 56 -
La capacité de charge [Maximum load capacity]: c'est la charge
maximale que peut porter et manipuler le robot dans la
configuration la plus favorable. Elle varie de quelques centaines de
grammes jusqu'à 100 kg.
La charge utile [Nominal load capacity]: C'est la charge maximale
que peut porter le robot sans dégrader la répétabilité et les
performances dynamiques quelque soit la position. Elle est
nettement inférieure à la charge maximale.](https://image.slidesharecdn.com/introduction-robotique-les-ri-2021-2022-250915191637-9639c3bb/85/Introduction-Robotique-Les-RI-2021-2022-ppsx-24-320.jpg)
![- 57 -
Les possibilités de synchronisation avec d’autres machines
La source d'alimentation [Power source]: elle permet de savoir
la source d'alimentation nécessaire pour faire fonctionner le
robot. Plus le robot est fort, plus il aura besoin de courant pour
fonctionner correctement.
• Les performances-homme: On entend par là la facilité d’utilisation
du robot par un opérateur non spécialiste.
• Les performances-économiques Il s’agit essentiellement de la
rentabilité d’utilisation de robots dans l’entreprise.
La fiabilité: elle sera définie par un taux de pannes](https://image.slidesharecdn.com/introduction-robotique-les-ri-2021-2022-250915191637-9639c3bb/85/Introduction-Robotique-Les-RI-2021-2022-ppsx-25-320.jpg)






















![PPT_ROBOTIQUE[1][2][1]23ddnnfnfn44nnf.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptrobotique121-240805211059-e207bfcd-thumbnail.jpg?width=640&height=640&fit=bounds)





