A la findes années 60, GENERAL MOTORS a passé un appel d'offre pour la
conception d'un système pour remplacer les armoires à relais et lui permettre de faire
des modifications de cycle de fabrication à moindre coût, plus rapidement, et en
conservant une possibilité d’évolution. C’est la société BEDFORD ASSOCIATES, et plus
particulièrement Richard MORLEY qui, en créant le concept d’automate
programmable, emporta la marché. Le premier automate fut baptisé Modicon 084
(MOdular Digital CONtrol) car il concrétisait le 84ème projet de la société, et fut
présenté fin 1969. Modicon 084 possède 255 Entrées/Sorties, une mémoire de 4 Ko,
sa programmation se fait en LADDER, sa dimension L 500 x H 1200 x P 340, son
poids est de 46 Kg !!
1. Histoire sur l’invention d’un premier
Automate Programmable :
3.
Un automate programmableest un appareil dédié au contrôle de
machines ou de processus industriels. En d’autres termes, un automate
programmable est un calculateur logique, ou ordinateur, au jeu
d’instructions volontairement réduit, destiné à la conduite et à la
surveillance en temps réel de processus industriels. Il réalise des
fonctions d’automatisme pour assurer la commande de pré-actionneurs
et d’actionneurs à partir d’informations logique, analogique ou
numérique.
2. Automate Programmable:
Définition
4.
• Encombrement réduitdans l'armoire
• Moins de câblage interne,
• Possibilité des modifications aisée,
• Récupération des modifications effectuées facile.
• Coût d’investissement moindre (par rapport aux relais). Ceci est même vrai pour
des applications simples (quelques dizaines de relais).
• Réalisation simple et peu couteuses d'applications similaires il suffit de "recopier" le
programme.
• Maintenance facilité : l'API par lui même est relativement fiable et peut aider
l'homme dans sa recherche de défauts (Voyants, bits indicateurs, messages, écrans
de dialogue, …).
• Possibilité de prévoir une maintenance à distance (réseau local, Internet, …).
• Possibilités de communication avec l'extérieur (ordinateur, autre API).
3. Automate Programmable: Intérêt
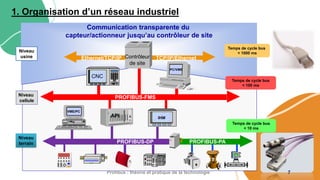
Communication transparente du
capteur/actionneurjusqu’au contrôleur de site
Contrôleur
de site
Ethernet/TCP/IP TCP/IP/Ethernet
Niveau
usine
Temps de cycle bus
< 1000 ms
Niveau
cellule
Temps de cycle bus
< 100 ms
Niveau
terrain
Temps de cycle bus
< 10 ms
CNC
PC/VME
PROFIBUS-FMS
VME/PC
PROFIBUS-DP PROFIBUS-PA
IHM
API
1. Organisation d’un réseau industriel
Profibus : théorie et pratique de la technologie 7
• Pendant cettephase, qui se produit immédiatement après la mise sous tension,
l'API effectue des tâches d'initialisation essentielles pour son bon fonctionnement.
• Il initialise le compteur de programme, qui est utilisé pour suivre l'avancement de
l'exécution du programme.
• Il initialise également le "chien de garde" qui surveille le fonctionnement du
système et peut réagir en cas de défaillance.
• D'autres tâches d'initialisation peuvent inclure la détection des changements d'état
entre les modes de fonctionnement (RUN / STOP).
1. Phase 0 : Initialisation
10.
• Pendant cettephase, qui dure très peu de temps (quelques microsecondes), l'API
se concentre sur la lecture des entrées provenant de capteurs externes.
• Les états logiques des entrées sont lus et stockés dans une zone mémoire
spécifique de l'API.
• Il est important de noter que pendant cette phase, le programme principal de l'API
n'est pas encore scruté, et les sorties ne sont pas mises à jour.
2. Phase 1: Lecture des Entrées
11.
• Durant cettephase, qui dure quelques millisecondes, l'API commence à exécuter le
programme principal.
• Les instructions du programme sont exécutées une à une. Si le programme
nécessite de connaître l'état d'une entrée, il utilise la valeur stockée dans la
mémoire de données de l'API (qui a été mise à jour lors de la phase précédente).
• Le programme détermine l'état des sorties en fonction de ses instructions et stocke
ces valeurs dans une zone mémoire spécifique réservée aux sorties.
• Il est important de noter que pendant cette phase, les entrées ne sont pas scrutées
pour détecter des changements d'état.
3. Phase 2: Exécution du Programme
12.
• Pendant cettephase, qui dure très peu de temps (quelques microsecondes), l'API
met à jour les sorties pour refléter les valeurs calculées lors de la phase
précédente.
• Les états des sorties mémorisés précédemment dans la mémoire de données sont
reportés sur le module de sorties, ce qui peut entraîner des actions physiques
(comme la mise en marche ou l'arrêt de machines).
• Pendant cette phase, ni les entrées ni le programme principal ne sont scrutés.
4. Phase 3: Mise à Jour des Sorties
• Ce pointde vue offre une vue globale et abstraite du système automatisé. Il se
concentre sur les tâches ou les fonctions principales du système, sans entrer dans
les détails techniques.
• Aucune contrainte technologique ou spécification détaillée n'est prise en compte.
Il s'agit d'une vision conceptuelle.
• Exemple : Pour un système de gestion de bâtiment, le point de vue système
pourrait décrire les fonctions principales telles que le contrôle de la température,
l'éclairage automatique et la surveillance de la sécurité, sans entrer dans les
détails sur les capteurs, les actionneurs ou les protocoles de communication
utilisés.
1. Point de vue Système :
15.
• Ce pointde vue se concentre sur la partie du système qui effectue le travail réel ou
interagit avec l'environnement. L'observateur s'implique dans le bon
fonctionnement de cette partie.
• Il décrit la partie opérative de manière événementielle, en termes de spécifications
fonctionnelles, mais ne fait pas d'hypothèses sur la réalisation de la partie
commande.
• Exemple : Il inclut des informations sur les capteurs spécifiques utilisés pour
mesurer la température, la luminosité, les mouvements, etc.
• Il décrit les actionneurs qui contrôlent les systèmes de chauffage, de
refroidissement, d'éclairage, d'alarme, etc.
2. Point de vue Partie Opérative :
16.
• Ce pointde vue appartient à celui qui conçoit la partie commande du système. Il
décrit de manière détaillée les spécifications fonctionnelles de la partie
commande, en tenant compte des spécifications techniques et technologiques de
la partie opérative.
• Il décrit également le comportement de la partie commande après avoir effectué le
choix technologique.
• Exemple : Il décrit comment le système réagit aux entrées des capteurs pour
prendre des décisions, par exemple, comment il ajuste la température en
fonction des lectures des capteurs.
• Pour un robot industriel, le point de vue partie commande détaillerait comment
les capteurs détectent les objets, comment le contrôleur interprète ces données,
et comment les moteurs sont contrôlés pour déplacer le bras robotique. Il
spécifierait les algorithmes de contrôle, les protocoles de communication, etc.
3. Point de vue Partie Commande :