Télécharger pour lire hors ligne







![ISIM Gabès API et Supervision industrielle A.U. 2011/2012
LASCMI3
S. MARAOUI Page 12
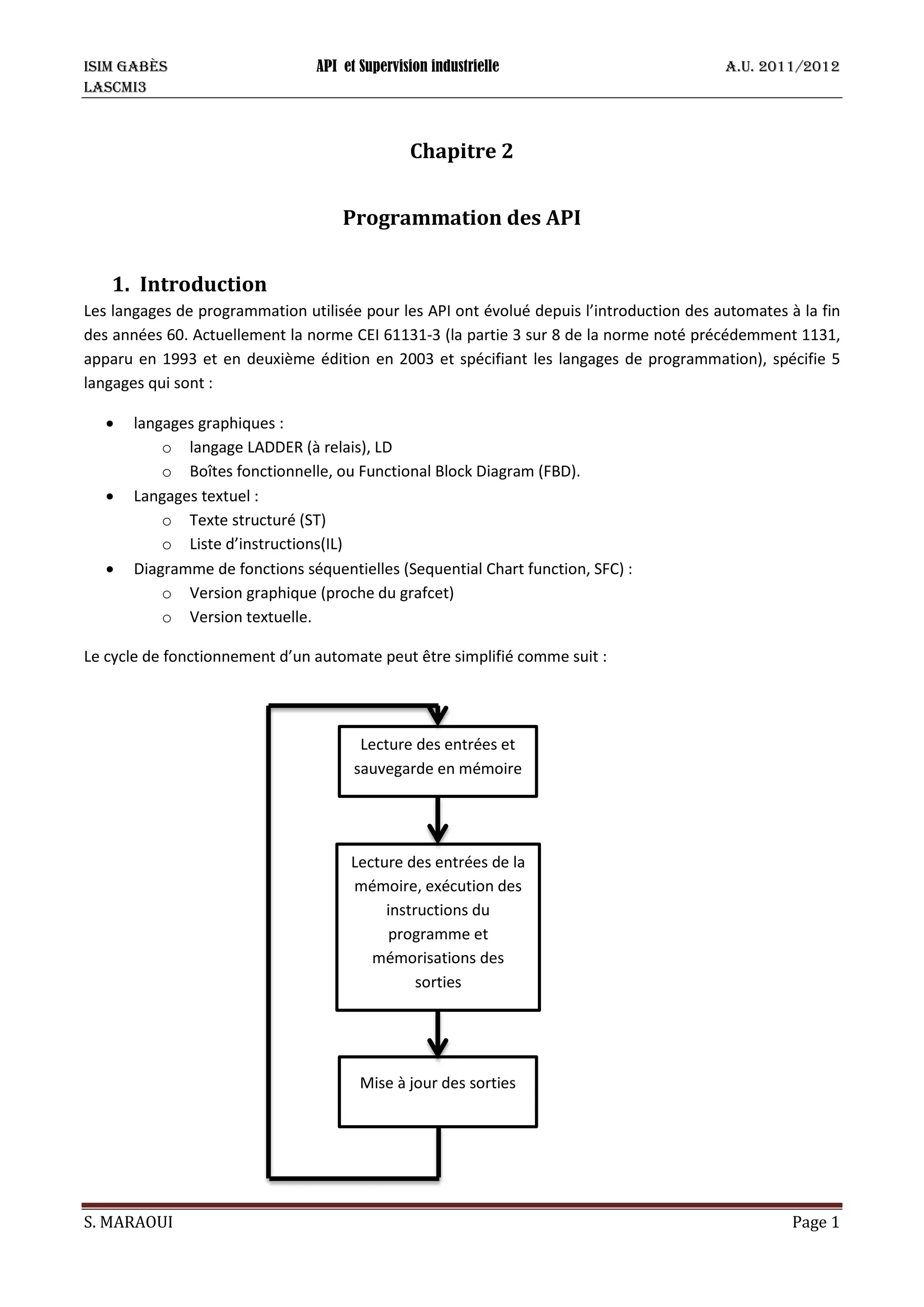
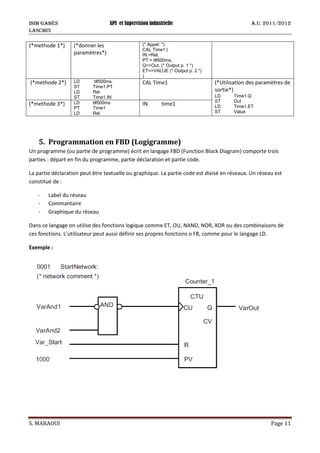
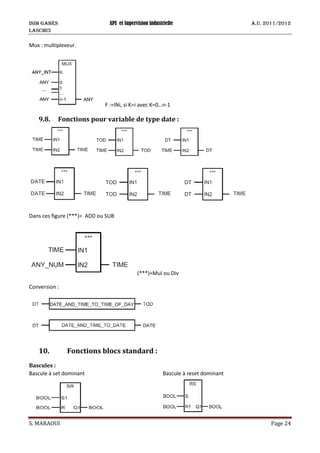
6. Programmation en texte structuré (ST)
Comme le IL, le langage ST est un langage textuel. Il est dit de haut niveau. Il offre un ensemble
d’instructions abstraites décrivant des fonctions plus ou moins complexes d’une façon condensée. Les
avantages du langage ST par rapport à celui de l’IL sont nombreuses, parmi lesquelles :
- Formulation très condensée des fonctions à réaliser.
- Construction claire du programme en blocs fonctionnels.
- Possibilité poussée de commande de processus.
Les inconvénients de ce langage sont liés principalement à leur compilation, puisque généralement les
programmes compilés sont plus longs et plus lents à l’exécution.
Expressions en ST
Un programme écrit en ST est formé par un ensemble d’expressions, séparé par un “;” (le retour à la ligne
est interprété comme un simple espace). Les commentaires sont de la forme (*Commentaire*) et peuvent
être dans l’expression même comme : A := B (* elongation *) + C (* temperature *);
Les expressions du langage sont résumé dans le tableau suivant :
Mot clé Description exemple
:= Affectation D :=10 ;
Appel de fonction FBName(
Par1:=10,
Par2:=20,
Par3:=>Res);
Return Retour Return ;
If Sélection IF d < e THEN f:=1;
ELSIF d=e THEN f:=2;
ELSE f:= 3;
END_IF;
Case Choix multiple CASE f OF
1: g:=11;
2: g:=12;
ELSE g:=FunName();
END_CASE;
For
Itération
FOR h:=1 TO 10 BY 2 DO
f[h/2] := h;
END_FOR;
While WHILE m > 1 DO
n := n / 2;
END_WHILE;
Repeat REPEAT
i := i*j;
UNTIL i < 10000
END_REPEAT;
Exit Fin de boucle exit;
N.B : différents opérateurs sont utilisé pour effectuer les opérations logiques et arithmétiques (&,and, or,
<,>, parenthèses,…) , comme par exemple pour le langage C, l’ordre de priorité est aussi semblable.](https://image.slidesharecdn.com/34api-chap2-200312141241/85/API-et-Supervision-industrielle-12-320.jpg)



![ISIM Gabès API et Supervision industrielle A.U. 2011/2012
LASCMI3
S. MARAOUI Page 19
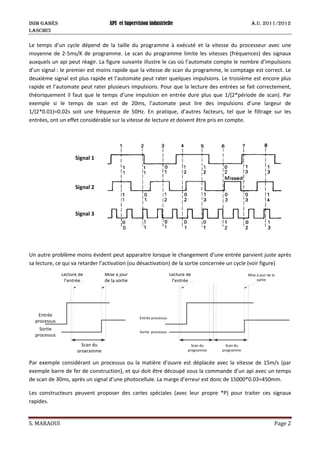
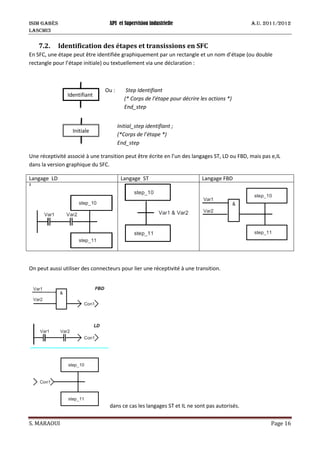
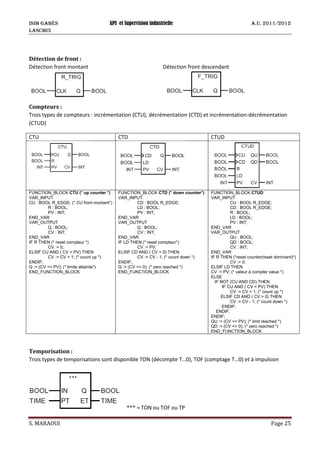
8. Types de données et déclaration des variables
8.1. Types de données
Types de données élémentaires :
Les types de données élémentaires spécifiés par la norme 61131-3, sont donnés par le tableau suivant :
Booléenne/string Entiers signés Entiers non signés Réels (FP) Temps, durée et
date
BOOL
BYTE
WORD
DWORD
LWORD
INT
SINT
DINT
LINT
UINT
USINT
UDINT
ULINT
REAL
LREAL
TIME
DATE
TIME_OF_DAY
DATE_AND_TIME
STRING
Avec : D= double, L= long, S = Short et U = unsigned.
Ces types ont caractérisé par leurs largeurs (nombres de bits) ainsi que par leur étendus (ou intervalles de
valeurs). Ceci ne s’applique pas aux types de temps et dates qui ont leurs propres spécifications.
Ces grandeurs sont résumées dans les tableaux suivants pour les différents types élémentaires.
Type de variable Bits Intervalle Initiale
BOOL 1 [0,1] 0
BYTE 8 [0,…,16#FF] 0
WORD 16 [0,…,16#FFFF] 0
DWORD 32 [0,…,16#FFFF FFFF] 0
LWORD 64 [0,…,16#FFFF FFFF FFFF FFFF] 0
SINT 8 [-127,…,128] 0
INT 16 [-32768,…,32767] 0
DINT 32 [-231
,…,231
-1] 0
LINT 64 [-263
,…,263
-1] 0
USINT 8 [0 … 255] 0
UINT 16 [0… 65535] 0
UDINT 32 [0… 231
-1] 0
ULINT 64 [0 …264
-1] 0
REAL 32 Spécifié par la norme IEEE 754-2008 0.0
LREAL 64 0.0
Type dtae Description Initiale
DATE Date (seulement) D#0001-01-01
TOD Temps durant la journée Tod#00 :00 :00
DT Temps et date Dt#0001-01-01-00 :00 :00
Time Durée t#0s
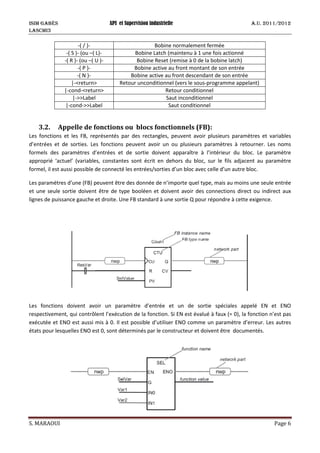
Types de données dérivées (ou définition de type)
L’utilisateur peut définir ses propres types de données à partir des types élémentaires. Ceci est appelé
dérivation ou définition de type. Ceci permet à l’utilisateur de définir les types les plus appropriés à ses](https://image.slidesharecdn.com/34api-chap2-200312141241/85/API-et-Supervision-industrielle-19-320.jpg)
![ISIM Gabès API et Supervision industrielle A.U. 2011/2012
LASCMI3
S. MARAOUI Page 20
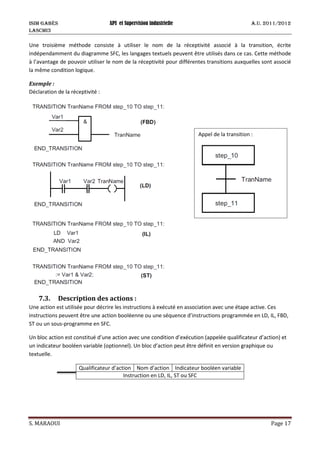
besoins. Ses définitions sont globales pour un projet api. La définition de type de variables utilise les mots
clés Type … END_TYPE.
Exemple :
TYPE
LongFloatNum : LREAL; (*derivation depuis le norme *)
FloatingPoint : LongFloatNum; (* derivation depuis un type définit par l’utilisateur *)
InitFloatNum : LREAL := 1.0; (* derivation avec une nouvelle valeur initiale *)
tControl : BOOL := TRUE; (* derivation avec nouvelle valeur initiale *)
END_TYPE
On peut aussi déclarer des type de données de type array (vecteur) ou structure.
Un array est une suite d’éléments de même type consécutifs en la mémoire et peuvent être accédé via un
index, alors que la structure est formée de sous-éléments qui peuvent être de type élémentaire ou dérivés.
Exemples:
1)
TYPE
Colour : (red, yellow, green); (* enumeration *)
Sensor : INT (-56..128); (* range *)
Measure : ARRAY [1..45] OF Sensor; (* array *)
TestBench : (* structure *)
STRUCT
Place : UINT; (* elementary data type *)
Light : Colour:= red; (* enumerated data type with initial value *)
Meas1 : Measure; (* array type *)
Meas2 : Measure; (* array type *)
Meas3 : Measure; (* array type *)
END_STRUCT;
END_TYPE
2) définition de structure relative au fonctionnement d’un moteur
TYPE
LimitedRevol : UINT (0..230);
TypLevel : (Idling, SpeedUp1, SpeedUp2, MaxPower);
MotorState :
STRUCT
Revolutions : LimitedRevol; (* limites *)
Level : TypLevel; (*type enumeration*)
MaxReached : BOOL; (*type elementaire *)
Failure : BOOL; (*type elementaire *)
Brake : BYTE; (*type elementaire *)
END_STRUCT;
END_TYPE](https://image.slidesharecdn.com/34api-chap2-200312141241/85/API-et-Supervision-industrielle-20-320.jpg)





Le document présente les langages de programmation utilisés pour les automates programmables industriels (API) selon la norme CEI 61131-3, qui inclut des langages graphiques et textuels. Il discute du cycle de fonctionnement des API, des identifications des entrées/sorties ainsi que de la programmation en langage Ladder et en Liste d'Instructions, en soulignant les spécificités de l'adressage et les éléments de base de chaque langage. Le texte traite également des problèmes de synchronisation et de vitesse liés aux signaux d'entrée et à l'architecture matérielle des API.














![Cours mooremealy [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/coursmooremealyautosaved-170802082038-thumbnail.jpg?width=640&height=640&fit=bounds)















































