Téléchargé 2 977 fois
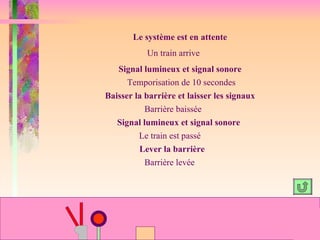
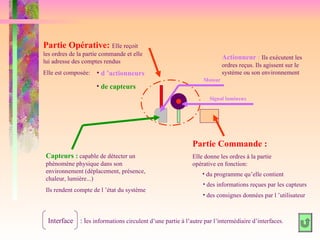
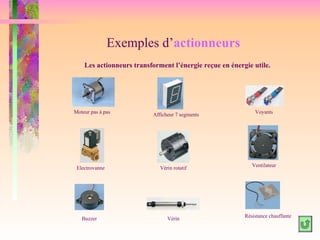
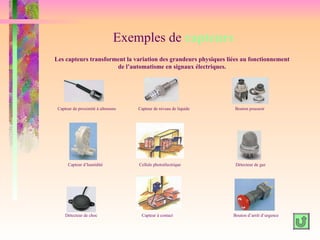
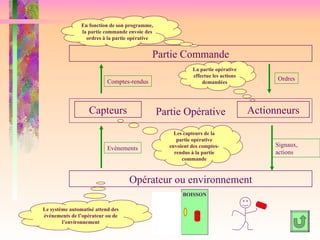
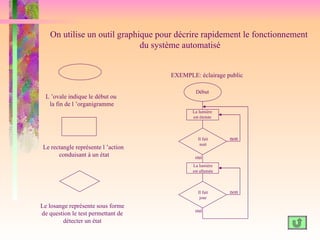
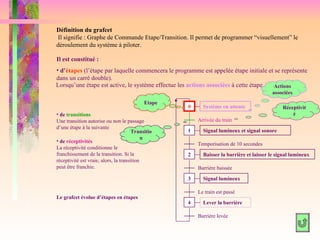

Le document traite des systèmes automatisés, décrivant leurs composantes comme la partie opérative et la partie commande, ainsi que les rôles des actionneurs et des capteurs. Il présente l'organigramme et le grafcet comme des outils pour visualiser et programmer le fonctionnement d'un système automatisé. Des exemples concrets de systèmes, tels que des distributeurs de boissons et des feux de croisement, illustrent les concepts abordés.



































































