Le document traite des systèmes automatisés et de l'importance des fonctions d'acquisition, de traitement et de communication d'informations pour interagir avec la matière d'œuvre. Il se concentre sur les capteurs, qui détectent divers événements physiques et fournissent des informations exploitables pour la commande des systèmes. Les capteurs sont classés par type (logiques, analogiques, capacitifs, inductifs, etc.) et les caractéristiques essentielles de chaque type sont détaillées.



























![ Réalisation d'une OR (F = A + B) : De même, F F . B (Morgan)
A B A
A A
F A . B A B
B
B
2.2- Opération NOR :
C’est le complément de l’opération OR.
Table de vérité Symbole
A B F A
0 0 1 F (norme IEEE)
B
0 1 0
1 0 0
1 1 0 A F (norme IEC)
1
B
F A . B (se lit (A ET B) tout barre)
Propriétés
Comme la fonction NAND, la fonction NOR n'est ni combinatoire, ni associative ; elle est aussi
généralisable pour n entrées
L'opérateur NOR est un système logique complet, comme le NAND.
2.3. Opération XOR :
Comme on l’a signalé précédemment, cette opération diffère du OR classique ou inclusif ; l’examen
de sa table de vérité ci dessous montre que F est égale à 1 si [(A=0 ET B=1) OU (A=1 ET B=0)] ;
formellement, on écrit :
F B B qu'on note F
A A A B
Table de vérité Symbole
A B F A
0 0 0 F (norme IEEE)
B
0 1 1
1 0 1
1 1 0 A
=1 F ( norme IEC)
B
F (se lit A OU exclusif B)
A B
Le signe "=" indique que la sortie est égale à "1" si une entrée et une seule est égale à 1.
Propretés
L’opération XOR est commutative : F = AB = B A.
L’opération XOR est associative : F = A(BC) = (A C = AB
B) C.
L’opération XOR n'est pas généralisable pour n entrées.
Remarque :
L'opérateur OU Exclusif est considéré comme l'opérateur programmable le plus élémentaire. En
effet, considérons sa table de vérité dans la figure suivante, on remarque que suivant l'état de P,
l'opérateur réalise la fonction OUI ou la fonction NON. Alors P est l'entrée de programmation de cet
opérateur.
86 F o n c t i o n T r a i t e r](https://image.slidesharecdn.com/atc-121010061843-phpapp01/85/Atc-28-320.jpg)



































![CHAPITRE 8
TEMPORISATEURS A BASE DE CIRCUITS INTEGREES
INTRODUCTION
Dans les systèmes numériques, on a souvent besoin q'une action soit effectuée pendant une durée
déterminée ; on parle de temporisation. Aussi, on a besoin d'un signal périodique qui synchronise ou
cadence les opérations d'un systèmes séquentiel ; on parle de base de temps ou d'horloge (Clock).
1. LE CIRCUIT DE BASE : LE CIRCUIT RC
A la base de pas mal de systèmes de temporisation, on trouve un circuit à base d'une résistance R et
d'un condensateur C (circuit RC). Ci -dessous, on étudie les aspects de base de ce circuit.
R
E C Vc R C Vc
Dans un circuit RC, avec C déchargé Dans un circuit RC, avec C déjà chargé
(Vc=0V), alimenté par une tension continue (Vc=Vc 0), la tension aux bornes de C
Vcc, la tension Vc aux bornes de C diminue ; on dit que C se décharge. la loi
augmente ; on dit que C se charge. La loi de de variation de Vc est de la forme :
variation de Vc est de la forme : -t/RC
Vc = Vc 0(e )
-t/RC
Vc = E(1-e )
Pour t=0 Vc=Vc0 ;
Pour t=0 Vc=0V ; Pour t Vc0 ;
Pour t VcE ; Pour t= Vc=0.33Vc0.
Pour t= Vc=0.63E.
Vc Vc
E Vc 0
0.63E
0.33E
t t
0
=RC 0
=RC
On démontre que pour atteindre une certaine valeur VcX, il faut un certain temps tX, tel que :
tX [ln(Variation__totale )]
RC Varaition
res tante Vc
E
où : Variation restante
ln est le logarithme népérien ; VcX
R est la valeur de la résistance ;
C est la capacité du condensateur. t
0 tX
t X [ln( E )]
RC
E X
Vc
C h a p i t r e 8 T e m p o r i s a t e u r s à b a s e d e c i r c u i t s i n t é g r é s 123](https://image.slidesharecdn.com/atc-121010061843-phpapp01/85/Atc-65-320.jpg)

![ Quand Vc, après un temps qui dépend de R et C, atteint 2/3 de E, on a :
(S=0) et (R=1) la sortie Vs est à 0 ;
le transistor est saturé ; on revient à l'état de repos.
L'expression de la durée de temporisation TW est :
TW [ln(
RC E )] TW ln3
RC TW . 1RC
1
EE
2
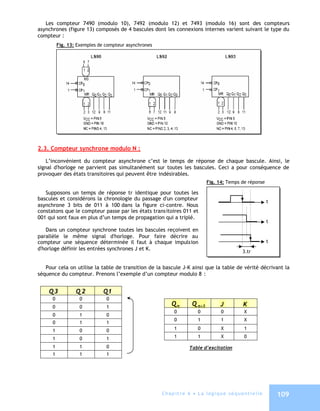
3
Vt E
E
t
0 R
Vc
E 4 8
2/3 E 7 3 S
t 6
0 NE555
Vs
E Vc 2 1 Vs
C
t Vt
0
TW TW
4.2. L'astable
Il y a plusieurs variantes de cette fonction ; on va étudier la plus courante. Son schéma et son
fonctionnement sont donnés ci-après :
On suppose qu'au démarrage, le condensateur C est déchargé et la sortie Vs à 1 ; alors les
variables du montage sont positionnées ainsi :
Le entrées de la bascule (S=0) et (R=0) Etat mémoire de la bascule et Vs reste à 1 ;
le transistor est bloqué, ce qui permet au condensateur C de se charger à travers (RA+ RB).
Quand Vc, après un temps qui dépend de (RA+ RB ) et C, atteint 2/3 de E, on a :
(S=0) et (R=1) la sortie Vs est à 0 ;
le transistor est saturé ; ce qui permet au condensateur C de se décharger à travers la
résistance RB. La tension Vc diminue alors.
Quand Vc, après un temps qui dépend de RB et C, atteint 1/3 de E, on a :
(S=1) et (R=0) la sortie Vs est à 1 ;
le transistor est bloqué ; le cycle recommence. Il s'agit bien d'un oscillateur.
L'expression de la période est T = T L + TH, avec :
TL BCln2
R et TH RA B)Cln2
( R T . 7( 2 RA B)C
0 R
Vc
E E
2/3 E
1/3 E RA
0 t 4 8 S
7 3
Vs
RB NE555
E
6
2 1 Vs
C
t Vc
0
Etat transitoire TL TH
T
C h a p i t r e 8 T e m p o r i s a t e u r s à b a s e d e c i r c u i t s i n t é g r é s 125](https://image.slidesharecdn.com/atc-121010061843-phpapp01/85/Atc-67-320.jpg)





































![Digital Signal Processor ( DSP ) [French]](https://cdn.slidesharecdn.com/ss_thumbnails/lesdsp-121002052639-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)










































![diaporama presentation arduino [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/diaporamapresentationarduinomodedecompatibilit-221127093339-7f2597f7-thumbnail.jpg?width=640&height=640&fit=bounds)























