Téléchargé 46 fois
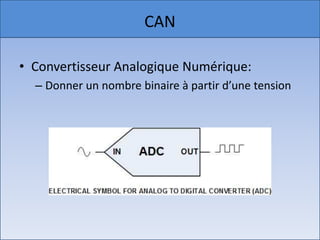
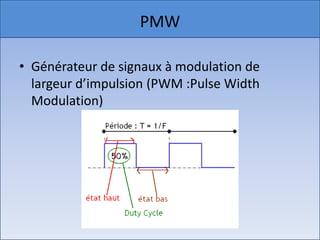
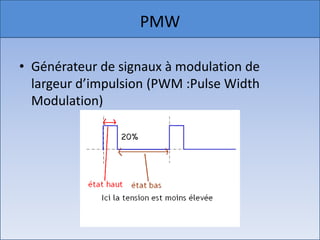
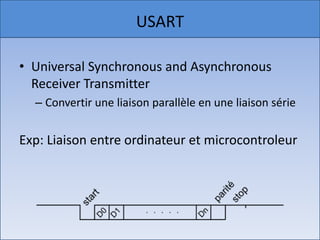


Le document présente divers périphériques et contrôleurs de bus de communication utilisés dans les microcontrôleurs, incluant des convertisseurs analogique-numérique et des générateurs de signaux à modulation de largeur d'impulsion. Il détaille également des protocoles de communication tels que USART, IIC, CAN, USB et Ethernet, soulignant leur structure et utilité dans divers systèmes. Enfin, d'autres composants tels que des comparateurs et des dispositifs de surveillance sont brièvement mentionnés.















































