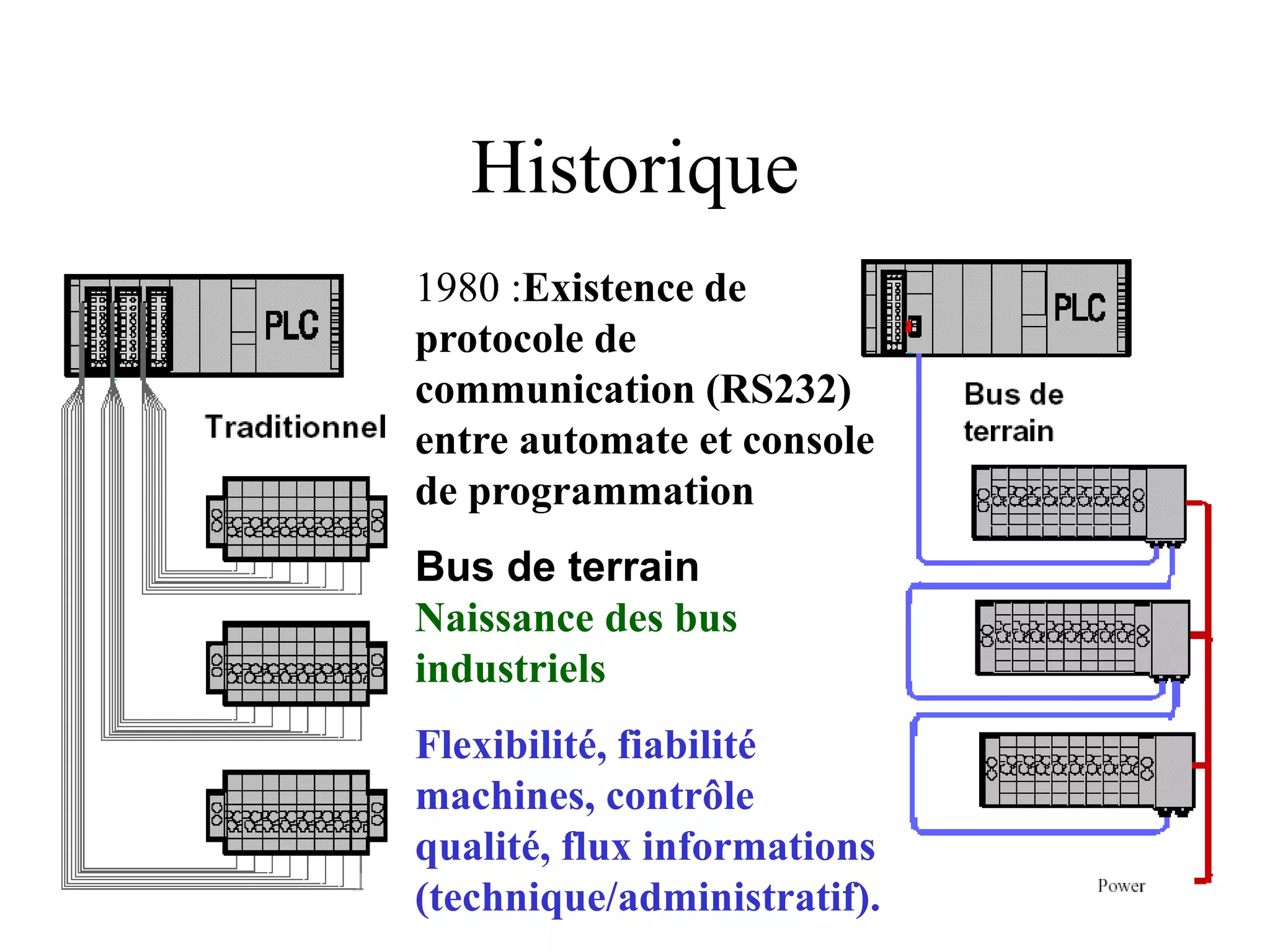
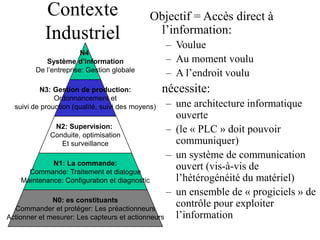
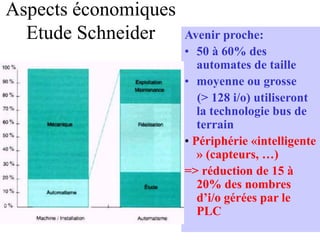
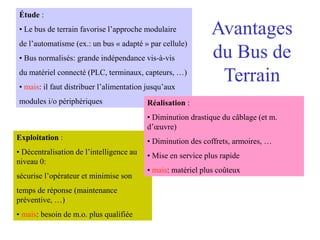
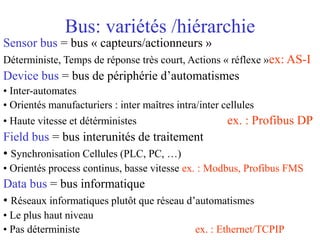
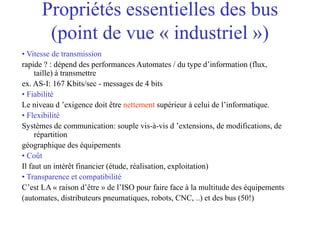
Le document traite de l'évolution des protocoles de communication dans l'automatisation, mettant en évidence l'importance des bus de terrain pour améliorer la flexibilité, la fiabilité et l'accès à l'information en milieu industriel. Il souligne les avantages tels que la réduction des câblages, l'optimisation des coûts et la simplification des projets, tout en mentionnant la nécessité d'une main-d'œuvre qualifiée pour tirer parti de ces technologies avancées. Enfin, il évoque la décentralisation de l'intelligence et l'émergence de standards qui devraient s'imposer dans le futur, malgré certaines hésitations économiques.