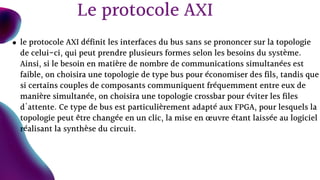
Le document présente le concept de réseau sur puce (NoC) dans les systèmes sur puce (SoC), expliquant son importance pour améliorer la communication entre différents composants intégrés. Il décrit les différents protocoles de communication, notamment les bus Avalon, Wishbone et CoreConnect, ainsi que le protocole AXI, chacun ayant ses spécificités et domaines d'application. Enfin, il aborde les avantages et les inconvénients des architectures de bus et des réseaux sur puce, mettant en lumière les enjeux de bande passante et de latence.
![INTRODUCTION
01
Les évolutions technologiques acquises dans le monde industriel actuel ont permis
l’intégration de plus en plus de fonctions sur le même circuit intégré numérique.
Aujourd’hui, on arrive à embarquer plusieurs microprocesseurs, des accélérateurs
matériels, des systèmes de communications divers et avec même des systèmes
d’exploitation. Ceci permet donc de réaliser toutes les fonctions nécessaires pour effectuer
des traitements informatiques complexes sur la même puce, d’où la naissance de la notion
des systèmes sur puce (SoC pour System on Chip), successeurs des circuits spécialisés
ASIC (Application Specific Integrated Circuit).Le choix du système de communication,
dans un système sur puce, reste un problème major. Ce choix dépend des composants
constituant le système et surtout le processeur utilisé. Les plateformes logicielles de
conception des SoCs, proposé par les fabricants des circuits FPGA, propose chacune un
type bien défini de système de communication [2]. Ces systèmes sont généralement des
bus standards modélisés en un langage de description de matériels comme le VHDL.
Récemment et dans le but d’améliorer la qualité et la rapidité de communication dans des
systèmes nouveaux, des réseauxsur puce (NoC: Network-On-Chip) ont été introduits.](https://image.slidesharecdn.com/presentationsurnoc-230206183247-78958e17/85/presentation-sur-NOC-pdf-3-320.jpg)
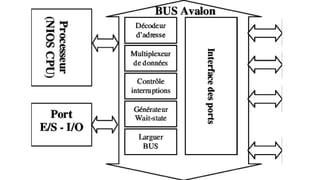
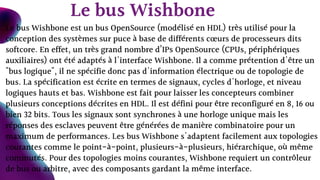
![Le bus Avalon peut être vu comme un ensemble de signaux prédéfinis
permettant de connecter un ou plusieurs IP. Ce bus comprend un
décodeur d’adresse, un multiplexeur de données, un générateur de
cycles d’attente et un contrôleur d’interruption (figure 2). Les
utilisateurs peuvent facilement intégrer leurs propres périphériques
avec le reste du système basé sur un processeur NIOS de Altera [9]. Le
bus Avalon permet la connexion entre des composants maîtres ou
esclaves. Il supporte plusieurs maîtres sur le bus. Un arbitrage est
nécessaire au partage d’une même ressource partagée par les circuits
maîtres. L’architecture multi-maître fournit la grande flexibilité dans
la conception des systèmes.
Le bus AVALON](https://image.slidesharecdn.com/presentationsurnoc-230206183247-78958e17/85/presentation-sur-NOC-pdf-8-320.jpg)











































![141[1]](https://cdn.slidesharecdn.com/ss_thumbnails/1411-120528165300-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



