Téléchargé 151 fois
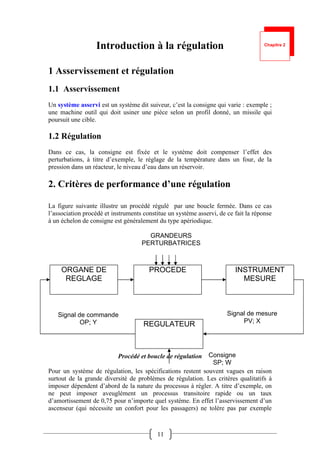


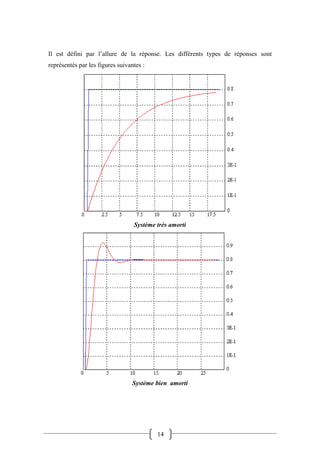





Le document traite de l'asservissement et de la régulation dans les systèmes, en définissant ces concepts et en expliquant leurs applications. Il aborde les critères de performance d'une régulation tels que la stabilité, la précision, l'amortissement et la rapidité, ainsi que l'évaluation des réponses des systèmes. La mise au point de la régulation repose sur la réponse à des variations de consigne et de perturbations, soulignant l'importance de la stabilité et des performances transitoires.















































