Téléchargé 243 fois

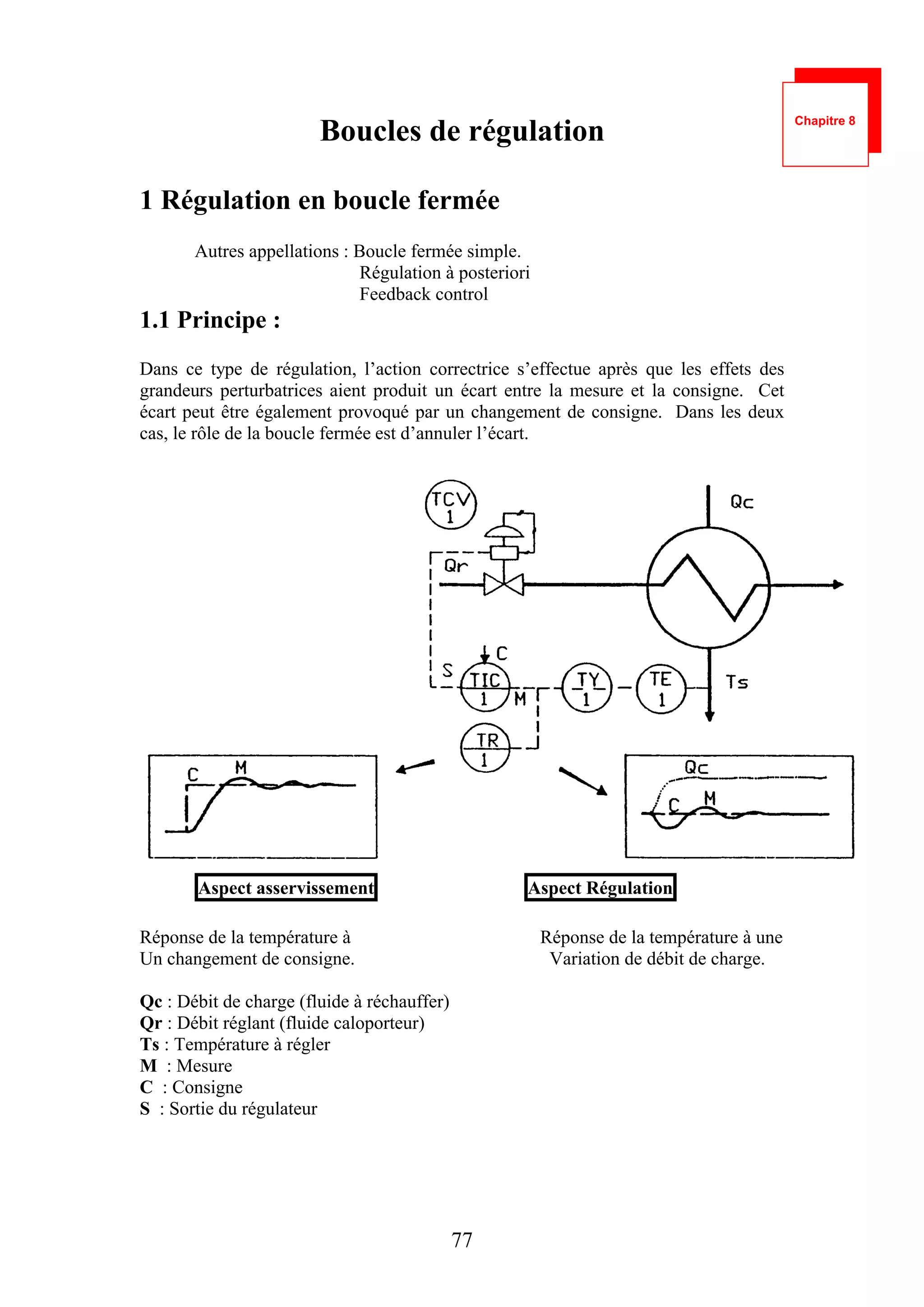

















Le document traite des boucles de régulation en boucle fermée, expliquant les principes de divers types d'actions dans la régulation PID. Il décrit le réglage des actions proportionnelle, intégrale et dérivée ainsi que plusieurs méthodes de réglage adaptées aux différents types de procédés. Enfin, il aborde spécifiquement la méthode de Ziegler et Nichols pour ajuster les paramètres des régulateurs.








































