Téléchargé 147 fois

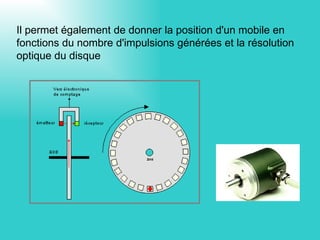
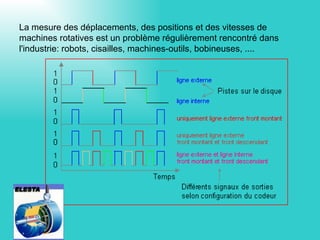
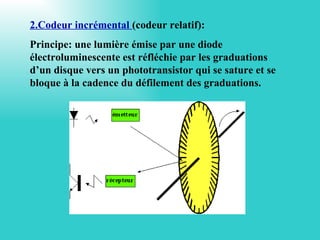
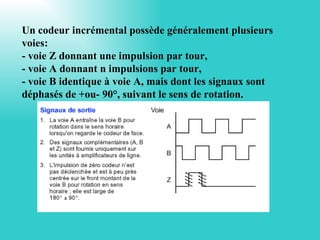
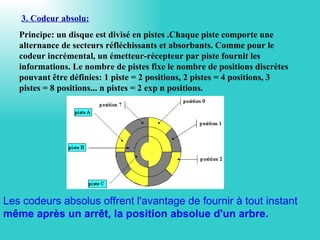





Le document présente les deux types de codeurs numériques utilisés pour la mesure angulaire digitale : les codeurs incrémentaux et absolus. Les codeurs incrémentaux fournissent des informations sur la position relative à partir d'impulsions générées, tandis que les codeurs absolus offrent la position exacte même après un arrêt. La mesure des déplacements et des vitesses est essentielle dans diverses applications industrielles telles que les robots et les machines-outils.