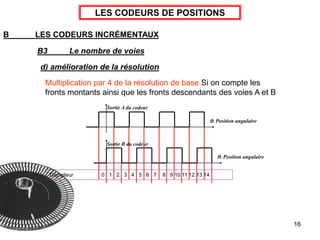
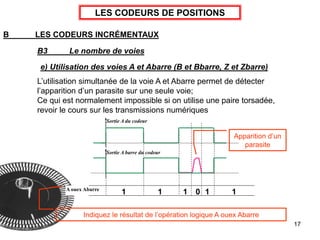
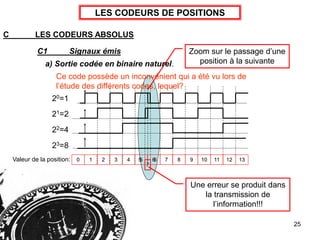
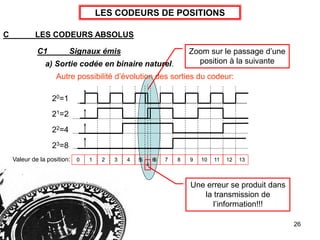
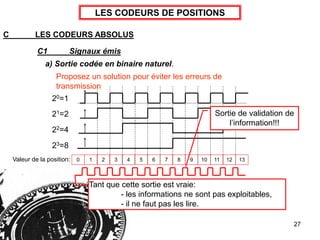
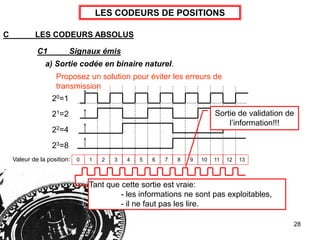
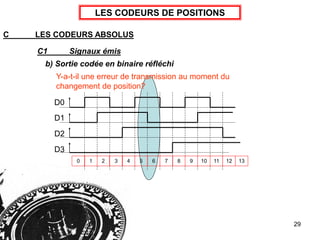
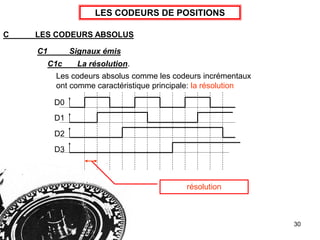
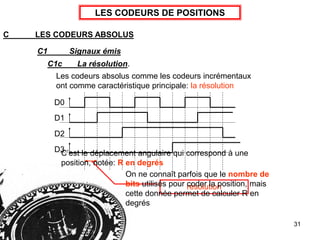
Le document traite des codeurs de positions, en se concentrant sur les codeurs incrémentaux et absolus. Il présente leur fonctionnement, les types de signaux émis, les différentes voies et résolutions, ainsi que les limitations de vitesse et de résolution pour chaque type de codeur. De plus, il aborde les technologies et caractéristiques électriques nécessaires pour les raccorder à d'autres systèmes.