Télécharger en tant que PDF, PPTX


![Robot Scara IBM
Robot Scara IBM
C124
S124
0
0
1
T4 = T1 × T4 = 0
0
Robot Scara IBM
d1C1+d2C12
d2S1C2+d1S1+d2C1S2
r
1
d1C1+d2C12
d2S1C2+d1S1+d2C1S2
r
1
et
d1C1 + d2C12 = px
d1S1 + d2S12 = py
(1)
(2)
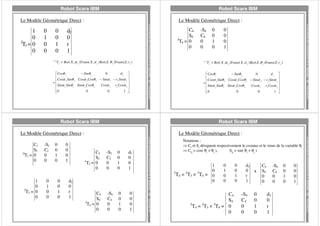
En élevant au carré et en additionnant les expressions (1) et (2), nous
obtenons :
d12 + d22 + 2d1d2 (C1C12 + S1S12) = px2 + py2
ce qui donne : C2 = (px2 + py2 - d12 - d22)/(2d1d2) car C1C12 + S1S12 = C2
d’où : 1 + tan2θ2 = [(2d1d2)/( px2 + py2 - d12 - d22)]2
De plus : 1 + tan2θ2 = 1/C22
ainsi : θ2 = Arctg[±(√1 - C22/C2)]
DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20
px
py
pz
1
1996
0
0
1
0
ax
ay
az
0
DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20
nx
ny
nz
0
1996
sx
sy
sz
0
-S124
C124
0
0
px
py
pz
1
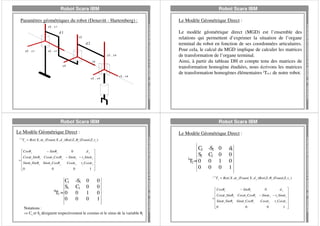
Le Modèle Géométrique Inverse :
Jean Michel Olive
C124
S124
0
0
1
T4 = T1 × T4 = 0
0
0
0
1
0
ax
ay
az
0
Robot Scara IBM
Le Modèle Géométrique Inverse :
U0 =
-S124
C124
0
0
nx
ny
nz
0
DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20
d1C1+d2C12
d2S1C2+d1S1+d2C1S2
r
1
U0 =
sx
sy
sz
0
1996
px
py
pz
1
Jean Michel Olive
0
0
1
0
ax
ay
az
0
Jean Michel Olive
-S124
C124
0
0
nx
ny
nz
0
1996
C124
S124
0
0
1
T4 = T1 × T4 = 0
0
sx
sy
sz
0
Jean Michel Olive
U0 =
Le Modèle Géométrique Inverse :
DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20
Le Modèle Géométrique Inverse :](https://image.slidesharecdn.com/modelescara-131024170419-phpapp01/85/Modele-scara-6-320.jpg)
![Robot Scara IBM
d’où :
et :
tan (θ1 + θ2 + θ4) = sy/sx
θ4 = Arctg (sy/sx) - θ2 - θ1
1996
Enfin, connaissant θ1 et θ2, nous pouvons déterminer θ4. En identifiant les
matrices U0 et 0T4, nous pouvons écrire : sx = C124 sy = S124
Jean Michel Olive
Les équations précédentes (1) et (2) peuvent s’écrire :
d1C1 + d2(C1C2 - S1S2) = px (1)
d1S1 + d2(S1C2 + S2C1) = py (2)
nous permet d’écrire : C1 = (px + d2S1S2)/(d1 + d2C2)
et en remplaçant dans (2), nous en déduisons :
S1 = [py (d1 + d2C2) - d2S2px]/[(d1 + d2C2)2 + d22S22]
Maintenant, nous remplaçons cette expression dans (1) et nous avons :
C1 = [px (d1 + d2C2) - d2S2py]/[(d1 + d2C2)2 + d22S22]
Nous pouvons alors en déduire :
θ1 = Arctg (S1/C1)
DIAM-IUSPIM Av. Esc. Normandie Niemen 13397 Marseille Cedex 20
Le Modèle Géométrique Inverse :](https://image.slidesharecdn.com/modelescara-131024170419-phpapp01/85/Modele-scara-7-320.jpg)

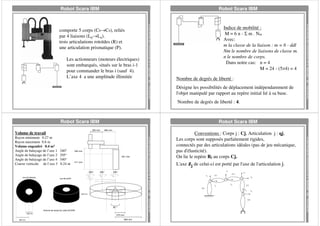
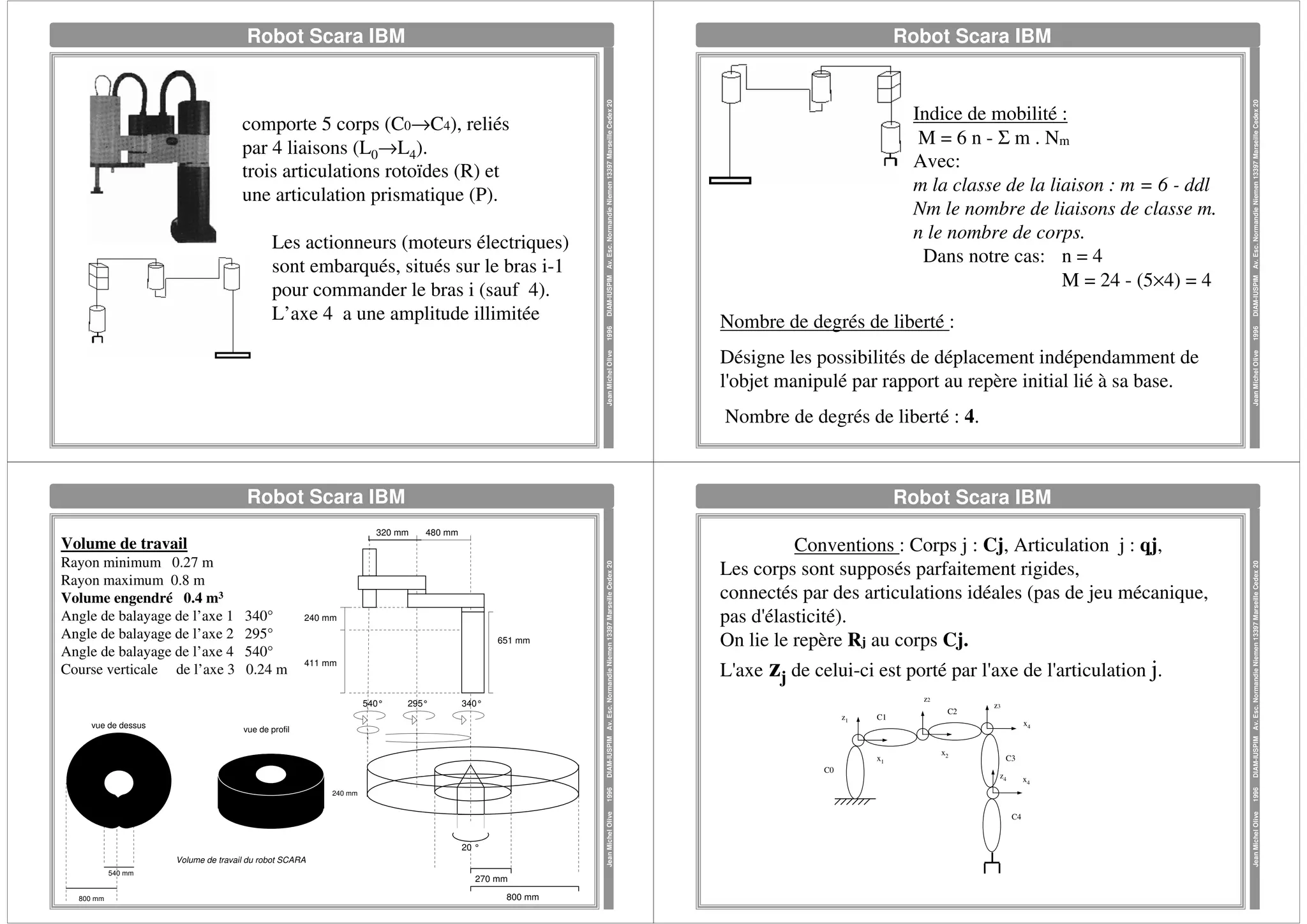
Le document présente une analyse technique du robot SCARA IBM à travers le calcul de ses degrés de liberté et la modélisation géométrique directe et inverse. Il détaille les paramètres de configuration, notamment les liaisons et les articulations, ainsi que les transformations de coordonnées nécessaires pour décrire la position de l'organe terminal. Des matrices de transformation sont décrites pour modéliser le comportement du robot en fonction de ses coordonnées articulaires.



























































![PPT_ROBOTIQUE[1][2][1]23ddnnfnfn44nnf.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptrobotique121-240805211059-e207bfcd-thumbnail.jpg?width=640&height=640&fit=bounds)

























