Téléchargé 17 fois


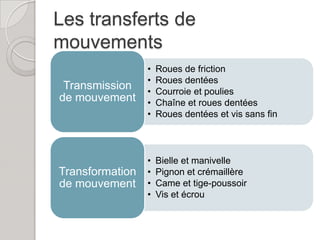

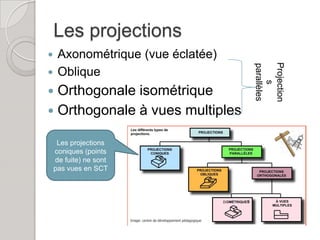


L'atelier du 16 novembre 2012 vise à permettre aux participants d'approprier de nouveaux savoirs en ingénierie mécanique et de découvrir des méthodes pédagogiques innovantes. Les activités incluent la construction de montages, l'analyse de mouvements et la compréhension des systèmes mécaniques et de transmission. Les concepts abordés comprennent les types de liaisons, le changement de vitesse, et les normes de représentation graphique.






























































