Téléchargé 12 fois


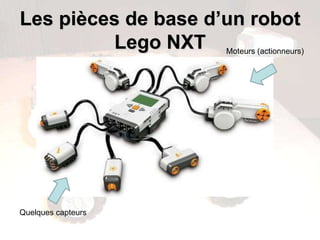

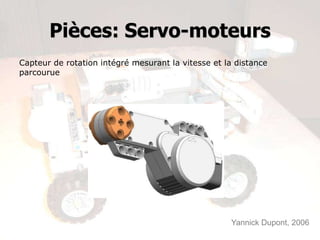








Ce document présente une formation sur la robotique pour adultes, axée sur la programmation de robots à l'aide du matériel Lego et du logiciel Lego Mindstorms. Les participants apprennent à construire et programmer des robots, explorer des défis, et expérimenter avec divers capteurs et moteurs. Des activités d'apprentissage sont proposées pour différents cours, avec un appel à volontaires pour évaluer de nouvelles situations.

































