Téléchargé 234 fois
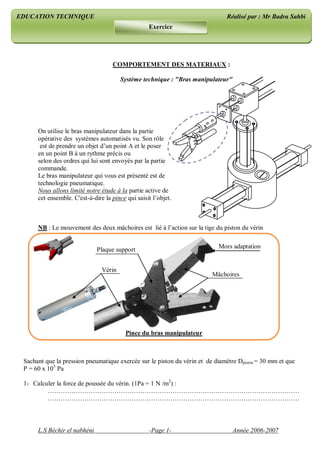



Le document traite du comportement des matériaux en lien avec un bras manipulateur pneumatique, en se concentrant sur la partie active, à savoir la pince qui saisit les objets. Il présente des calculs liés à la force de poussée du vérin, au diamètre extérieur minimal de la tige du piston et à la variation de longueur de cette tige, en utilisant des principes de mécanique et des formules pertinentes. Les résultats incluent un diamètre extérieur de 13,78 mm et une variation de longueur de 0,03 mm.







































![[0] cours electronique base](https://cdn.slidesharecdn.com/ss_thumbnails/0courselectroniquebase-150224134709-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)

![[0] cours electronique base](https://cdn.slidesharecdn.com/ss_thumbnails/0courselectroniquebase-150224125829-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
