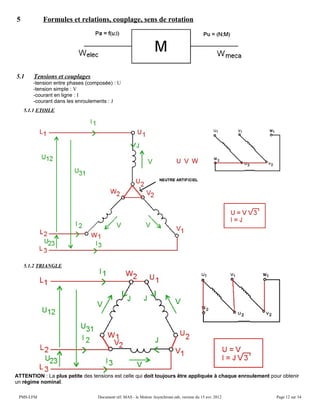
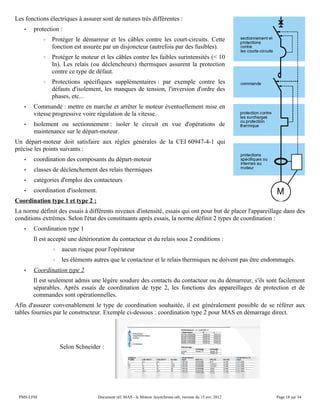
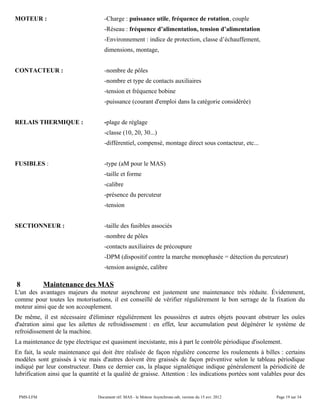
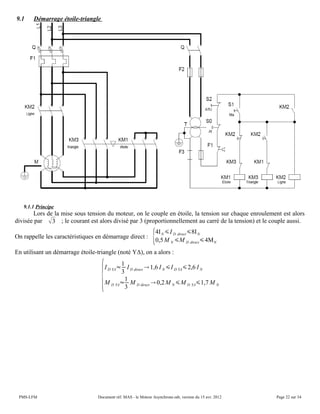
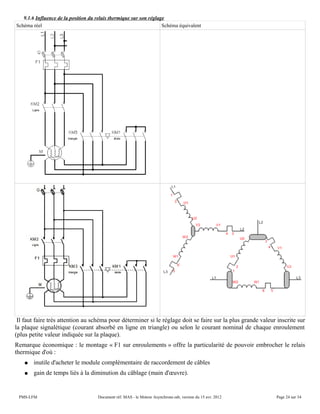
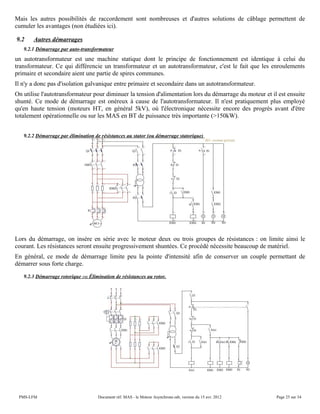
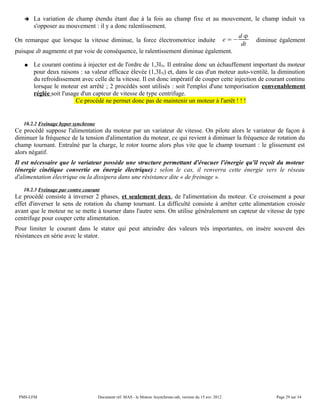
Le document traite des moteurs asynchrones triphasés (MAS), en détaillant leur constitution, fonctionnement, avantages ainsi que les normes de rendement en vigueur. Il aborde également les différentes méthodes de démarrage et de freinage, ainsi que des considérations sur la maintenance et l'écoconception. Les normes internationales CEI 60034 sont mises en avant pour établir des classifications de rendement harmonisées au niveau mondial.
















































































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)

