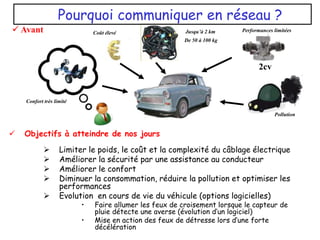
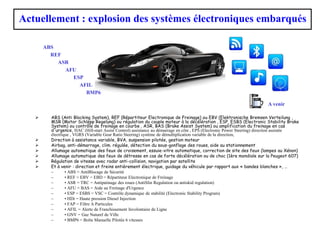
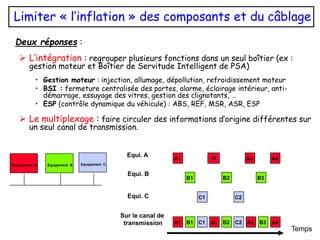
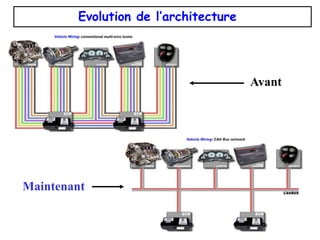
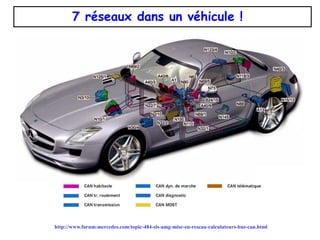
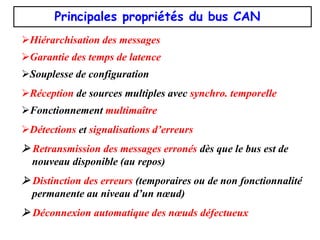
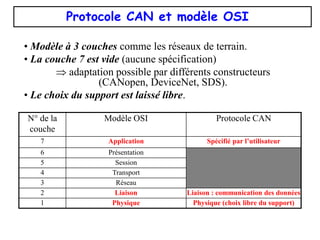
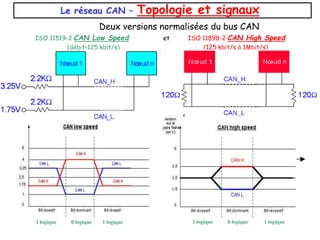
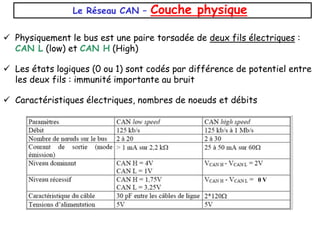
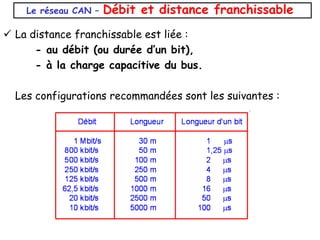
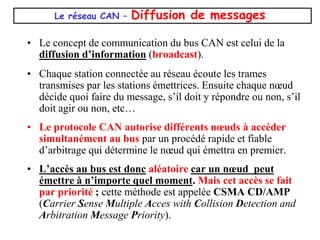
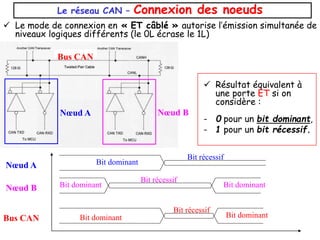
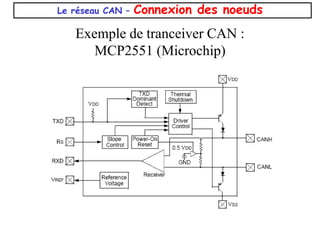
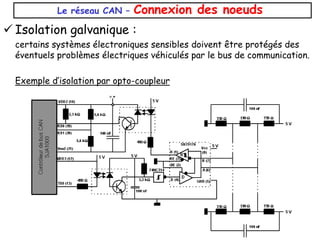
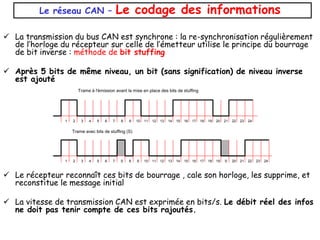
Le document présente l'évolution du bus CAN (Controller Area Network) depuis sa conception en 1983 jusqu'à son intégration dans divers systèmes électroniques des véhicules modernes. Il décrit les objectifs de réduction de poids et de coûts, ainsi que l'amélioration de la sécurité et des performances des automobiles grâce à cette technologie. Les spécificités techniques du protocole CAN, incluant la diffusion des messages et l'arbitrage entre nœuds, sont également abordées.