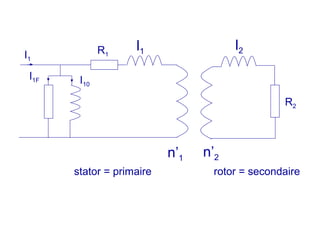
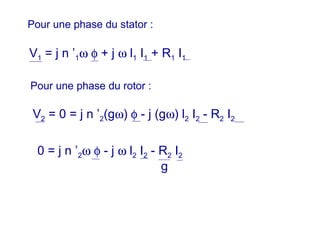
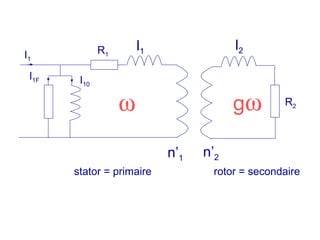
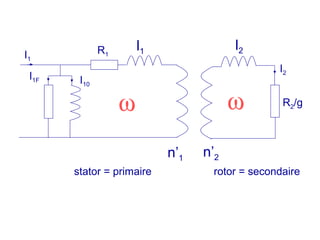
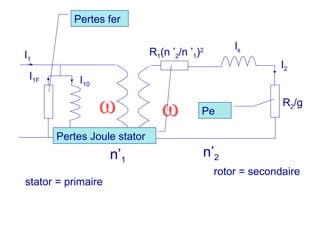
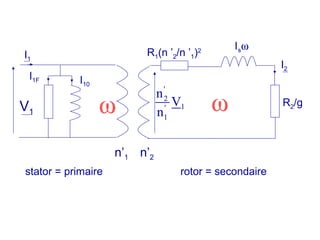
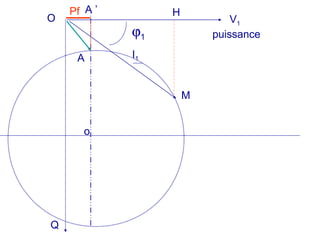
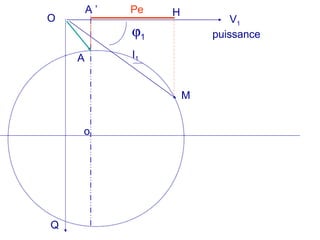
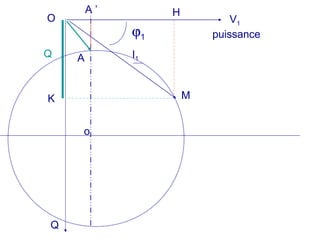
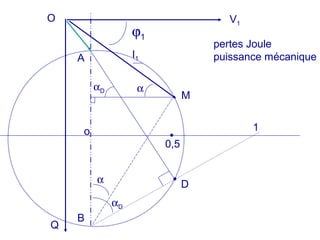
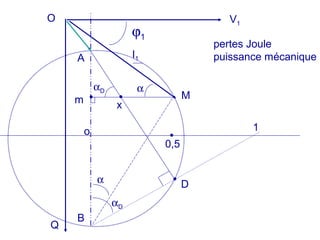
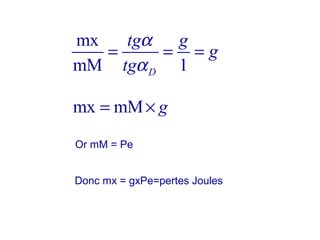
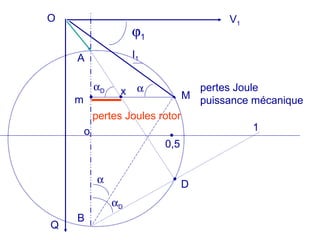
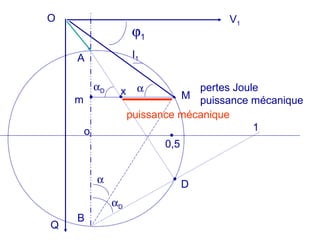
La machine asynchrone est un transformateur à champ tournant où les courants statoriques et rotoriques engendrent des forces magnétomotrices. Le document aborde des concepts tels que les pertes joules, la puissance mécanique et les essais de fonctionnement. Il présente également des équations essentielles pour analyser le comportement de la machine dans différentes conditions de fonctionnement.















































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)






