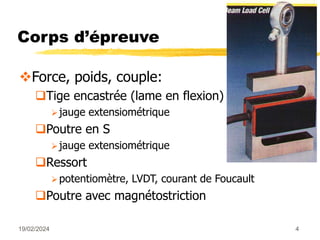
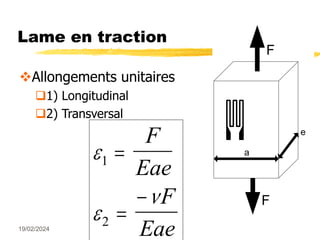
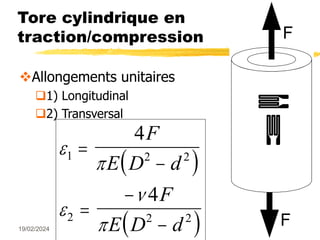
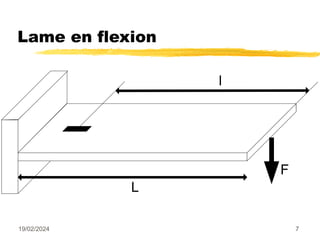
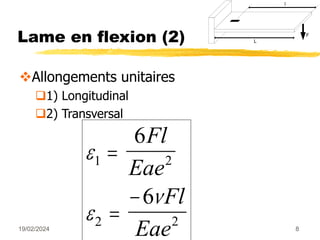
Le document traite des mesures de force, de couple et de pression, en expliquant différents modes de transduction tels que résistif, piézoélectrique, capacitif et inductif. Il détaille également le fonctionnement des jauges de contrainte ainsi que des méthodes de mesure de couple, y compris par jauges et déflexion. Enfin, il présente un bilan comparatif des jauges métalliques et à semi-conducteurs en termes de précision et d'application.






















![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)
