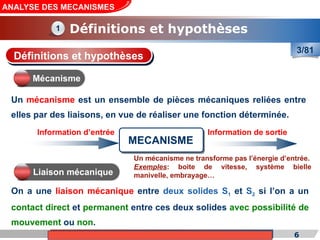
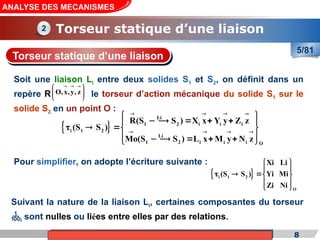
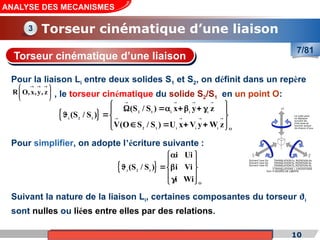
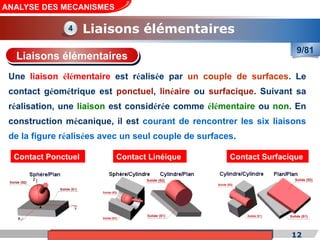
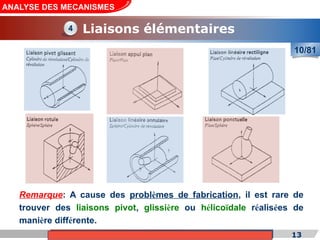
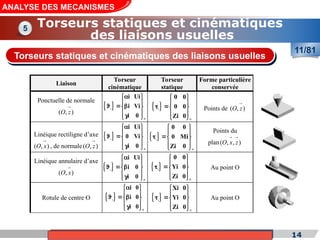
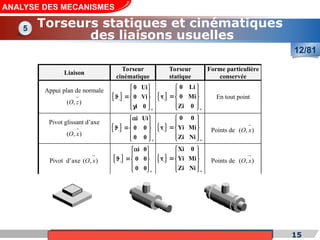
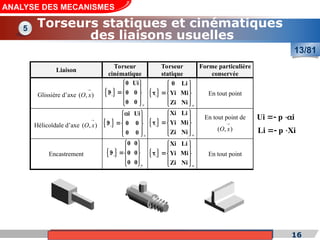
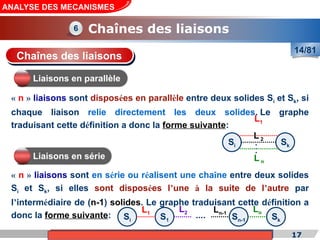
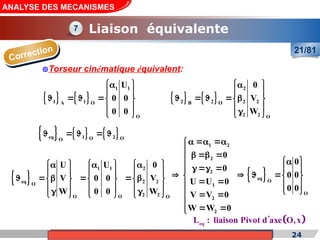
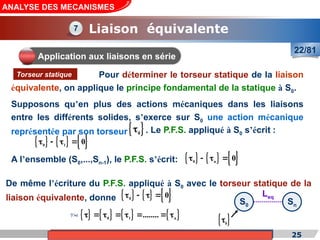
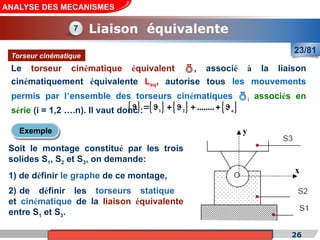
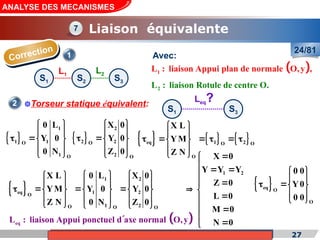
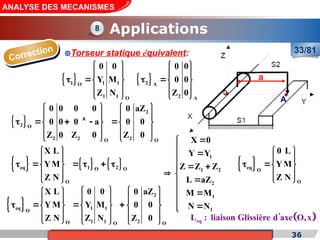
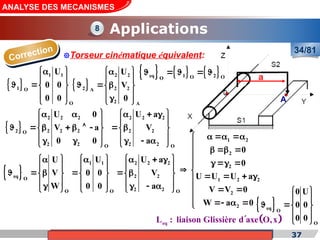
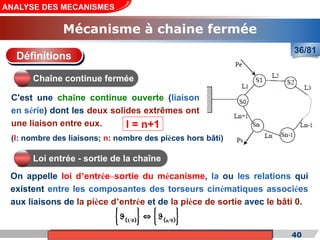
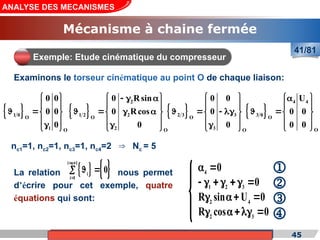
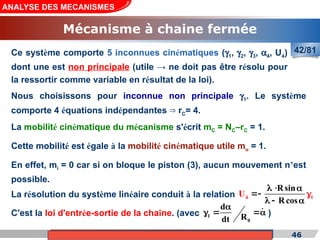
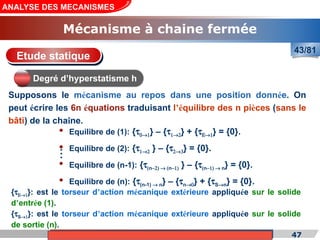
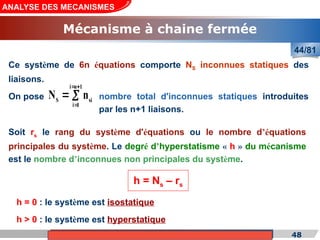
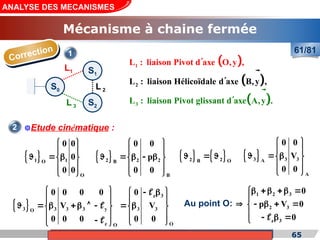
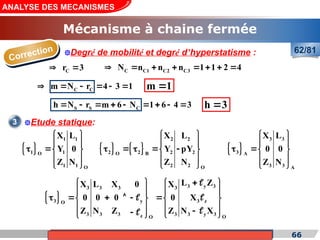
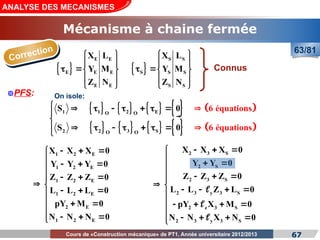
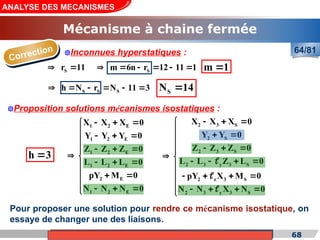
Le cours de construction mécanique de l'année universitaire 2012/2013 se concentre sur l'analyse des mécanismes et leurs applications dans la conception. Il vise à vérifier l'aptitude des mécanismes à réaliser une loi d'entrée/sortie souhaitée et à déterminer les dispositifs constructifs adéquats. Le document présente également les liaisons mécaniques, le torseur statique et cinématique des liaisons, ainsi que les différentes hypothèses et définitions nécessaires à l'analyse.























![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)





