Télécharger en tant que PDF, PPTX


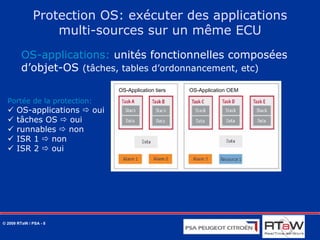

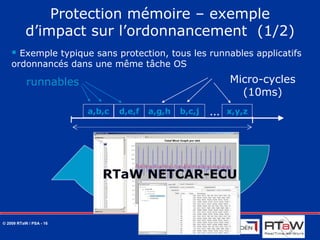


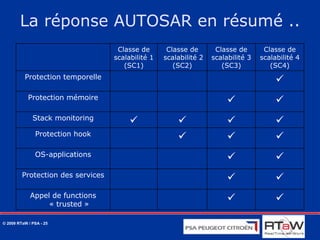


Le document traite des mécanismes de protection de mémoire et temporelle dans le système d'exploitation AUTOSAR, essentiels pour l'exécution sécurisée d'applications multi-sources sur un même ECU. Il souligne l'importance du partitionnement, du contrôle des ressources et de l'intégrité du système lors de l'intégration de codes tiers. Il présente également les bénéfices attendus, les défis à relever, ainsi que les perspectives d'évolution du système.