EEP306: pulse width modulation
•
6 j'aime•6,034 vues

communication engineering lab report, 5th sem, electrical engineering, IIT Delhi, eep306

Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à EEP306: pulse width modulation
Similaire à EEP306: pulse width modulation (20)
Plus de Umang Gupta
Plus de Umang Gupta (17)
Dernier
Dernier (20)
EEP306: pulse width modulation
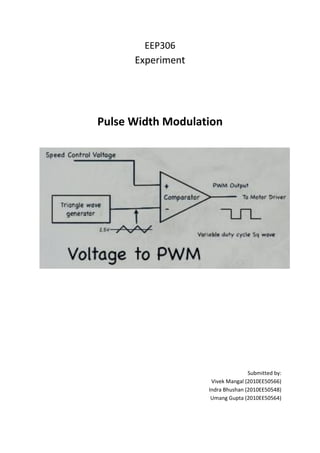
- 1. EEP306 Experiment Pulse Width Modulation Submitted by: Vivek Mangal (2010EE50566) Indra Bhushan (2010EE50548) Umang Gupta (2010EE50564)
- 2. Introduction: Pulse width Modulation uses a rectangular pulse wave whose width is modulated resulting in the variation of the average value of the waveform. The main advantage of PWM is that power loss in the switching devices is very low. When a switch is off there is practically no current, and when it is on, there is almost no voltage drop across the switch. Power loss, being the product of voltage and current, is thus in both cases close to zero. PWM also works well with digital controls, which, because of their on/off nature, can easily set the needed duty cycle. PWM has also been used in certain communication systems where its duty cycle has been used to convey information over a communications channel. Pulse Position Modulation: The amplitude and width of the pulse generated remains constant, however the position of pulse appearing in the generated PPM depends on the input. It is often implemented differentially as differential pulse-position modulation, where each pulse position is encoded relative to the previous; the receiver only measures the difference in the arrival time of successive pulses. It has higher noise immunity since all the receiver needs to do is detect the presence of a pulse at the correct time; the duration and amplitude of the pulse are not important. Expected PWM outputs can be generated through matlab. Message signal :
- 3. Matlab Code for PWM: %%pwm code close all clear all clc %%initialisation f=200; t=0:0.000025:0.005*2; fclk=2000; fs=1/0.000025 fcut=1500; m=1+0.75*sin(2*pi*f.*t); saw=1+sawtooth(2*pi*fclk.*t) o=zeros(1,length(m)); for i=1:length(m) if m(i)>saw(i) o(i)=1; end end [b,a]=butter(10,fcut/fs); mf=filter(b,a,o); num=b den=a bode(tf(num,den)) figure plot(t,mf,t,m) title('demodulation, and the original signal') xlabel('time'); ylabel('amplitude') figure plot(t,o) title('PWM signal') xlabel('time'); ylabel('amplitude') figure plot(t,o,'r',t,m,'black',t,saw,'blue') title('all signals') xlabel('time'); ylabel('amplitude') figure plot(t,m) title('msg signal') xlabel('time'); ylabel('amplitude')
- 4. PWM signal expected for the given message signal. The Saw-tooth signal (input in comparator) together with message signal and PWM generated : Demodulated signal plotted against the message signal :
- 5. Observation : Pulse Width Modulation Input wave shown with its pulse width modulated wave. 1-> Input wave 2 -> Pulse width modulated wave 3 -> Pulse width demodulated wave, observed inverted and lagging in phase with the input wave.
- 6. Pulse Position Modulation Input wave shown with its pulse position modulated wave. 1-> Input wave 2 -> Pulse position modulated wave 3 -> Pulse position demodulated wave, observed lagging in phase with the input wave. Inference : The expected output according to matlab is observed experimentally. We observe that in PWM, the pulses near the edges of the half cycle are always narrower than the pulses near the center of the half cycle such that the pulse widths are proportional to the corresponding amplitude of a sine wave at that portion of the cycle. The message input m(t) can be recovered for the PPM signal by passing it through a LPF .