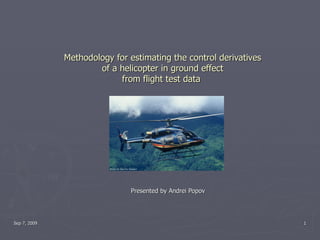
1. Methodology for estimating the control derivatives of a helicopter in ground effect from flight test data Presented by Andrei Popov Sep 7, 2009
2.
3.
4. Linear Model Sep 7, 2009 Helicopter linear and angular accelerations in 6 degrees of freedom State vector Control vector Stability derivatives Control derivatives influenced by IGE Forces and Moments x,u, X y,v, Y z,w, Z M,q L,p N,r
5.
6. Data processing Sep 7, 2009 Torque coefficient for helicopter in hover [1],[2]: Polynomial fitting of C Q ( C T ) out of ground effect: Polynomial fitting of C Q (collective) : C Q vs. H C Q vs. C T C Q vs. collective
7. Data processing 2 Sep 7, 2009 K(H) – Constant of ground effect vs. altitude [3]: Polynomial fitting of K(H) : Polynomial fitting of C Q (C T ,H) :
![In ground effect (IGE) theory Sep 7, 2009 ,[object Object],[object Object],[object Object],[object Object]](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)