Télécharger en tant que PDF, PPTX





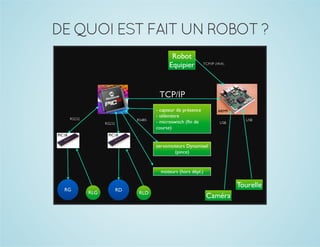
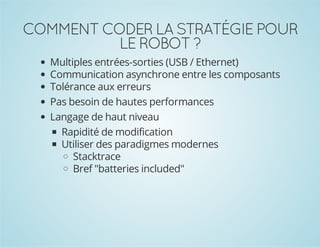
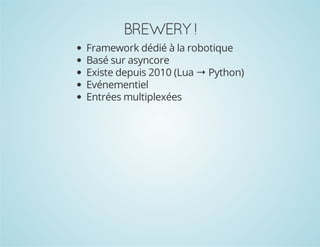
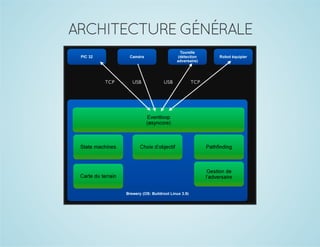
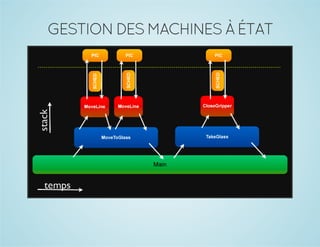
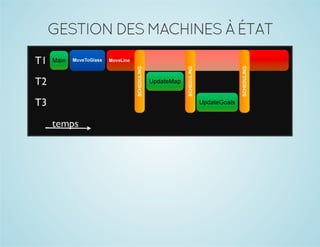

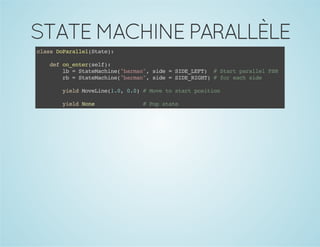


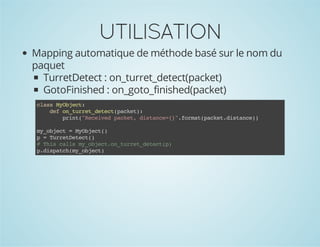
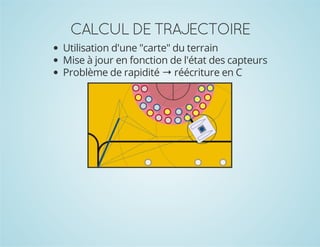






Le document présente les réalisations de l'équipe BH dans la robotique, notamment leur utilisation de Python pour la programmation de robots lors de compétitions. Il aborde des aspects techniques tels que la communication entre composants, la gestion des machines à état, et l'architecture logicielle de leurs robots. Bien que Python soit un outil efficace, l'équipe souligne ses limites et la nécessité de recourir à d'autres langages comme C pour certaines tâches critiques.




















