cours Introduction au programmation web Javascript
1.
Intégration de LoPSOet d’une Stratégie d’Arrêt
Séquentiel
Recherche Coopérative de Cibles par Essaims de UAVs
Votre Nom (Basé sur le document de recherche)
Votre Établissement de Recherche
June 21, 2025
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 1 / 11
2.
Sommaire
1 Introduction
2 Modèledu Système et Préliminaires
Dynamique et Capteurs des UAVs
Modèle de Communication
Mise à Jour de Croyance
Modèle Énergétique
Résumé de la Notation
3 Principes de PSO et LoPSO
Rappel du PSO Classique
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 2 / 11
3.
Contexte et Motivation
Lesessaims de UAVs : potentiel significatif pour la recherche, la
surveillance et les environnements dangereux.
Défi : coordonner un grand nombre de UAVs pour une détection
rapide et précise.
Limitation des approches traditionnelles : adaptabilité et
robustesse.
PSO (Particle Swarm Optimization) : utilisé pour la coordination
décentralisée et l’exploration.
Stratégies d’arrêt optimal : déterminer le moment optimal pour
cesser l’observation.
Approche hybride : intégrer LoPSO pour l’exploration spatiale et
une règle d’arrêt séquentielle pour le timing de décision.
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 3 / 11
4.
Motivation et Contributions
Motivation
Équilibrerexploration (nouvelles preuves) et exploitation
(confirmation).
Réduire le temps de détection.
Maintenir un taux élevé de vrais positifs.
Minimiser la consommation d’énergie et la surcharge de
communication.
Contributions
Développement d’un modèle de décision séquentielle basé sur le
problème du secrétaire (avec RL).
Proposition d’un cadre hybride intégrant LoPSO et la politique d’arrêt
(avec pseudocode complet).
Discussion et perspectives futures (plan d’expérimentation, KPI,
transfert industriel).
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 4 / 11
5.
Travaux Connexes
PSO etvariantes pour les essaims de UAVs :
PSO classique : convergence efficace.
PSO à localité contrainte (LoPSO) : améliore l’évolutivité et l’efficacité
de la couverture.
Arrêt optimal dans la recherche robotique :
Le problème du secrétaire : résolu pour des cas discrets et continus.
Application aux UAVs : détection rapide sous observations bruitées.
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 5 / 11
6.
Modèle du Systèmeet Préliminaires
Essaim de UAVs : Nu UAVs indexés par i = 1, . . . , Nu.
Environnement : discrétisé en 2D (cellules h × h).
Position et Vitesse : Xt
i = (Xt
i,x , Xt
i,y ), V t
i = (V t
i,x , V t
i,y ).
Chaque UAV vole à une vitesse nominale v0.
Capteur : mesure une observation bruitée St
i (x, y) ∈ {0, 1} dans sa
cellule actuelle.
Bruit du capteur :
P(St
i (x, y) = 1|T(x, y) = 1) = pTP (Vrai Positif)
P(St
i (x, y) = 1|T(x, y) = 0) = pFP (Faux Positif)
Indépendance entre UAVs.
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 6 / 11
7.
Modèle de Communication
LesUAVs communiquent avec leurs voisins dans un rayon fixe R.
Ht(Ui ) = {j | ∥Xt
i − Xt
j ∥ ≤ R, j ̸= i} : voisins de Ui .
Communication fiable via broadcast UDP-like.
Délai de propagation δcomm.
Structure des messages : (i, n, I)
i: émetteur ; n: type d’information ; I: contenu.
Messages horodatés et ordonnés, sans perte.
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 7 / 11
8.
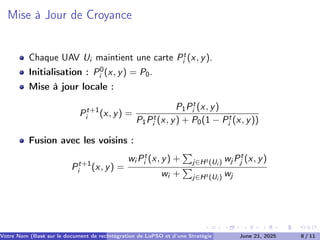
Mise à Jourde Croyance
Chaque UAV Ui maintient une carte Pt
i (x, y).
Initialisation : P0
i (x, y) = P0.
Mise à jour locale :
Pt+1
i (x, y) =
P1Pt
i (x, y)
P1Pt
i (x, y) + P0(1 − Pt
i (x, y))
Fusion avec les voisins :
Pt+1
i (x, y) =
wi Pt
i (x, y) +
P
j∈Ht (Ui ) wj Pt
j (x, y)
wi +
P
j∈Ht (Ui ) wj
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 8 / 11
9.
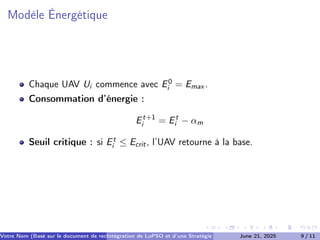
Modèle Énergétique
Chaque UAVUi commence avec E0
i = Emax .
Consommation d’énergie :
Et+1
i = Et
i − αm
Seuil critique : si Et
i ≤ Ecrit, l’UAV retourne à la base.
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 9 / 11
10.
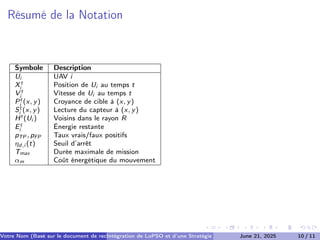
Résumé de laNotation
Symbole Description
Ui UAV i
Xt
i Position de Ui au temps t
V t
i Vitesse de Ui au temps t
Pt
i (x, y) Croyance de cible à (x, y)
St
i (x, y) Lecture du capteur à (x, y)
Ht (Ui ) Voisins dans le rayon R
Et
i Énergie restante
pTP , pFP Taux vrais/faux positifs
ηd,i (t) Seuil d’arrêt
Tmax Durée maximale de mission
αm Coût énergétique du mouvement
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 10 / 11
11.
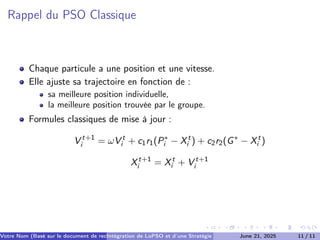
Rappel du PSOClassique
Chaque particule a une position et une vitesse.
Elle ajuste sa trajectoire en fonction de :
sa meilleure position individuelle,
la meilleure position trouvée par le groupe.
Formules classiques de mise à jour :
V t+1
i = ωV t
i + c1r1(P∗
i − Xt
i ) + c2r2(G∗
− Xt
i )
Xt+1
i = Xt
i + V t+1
i
Votre Nom (Basé sur le document de recherche) (Votre Établissement de Recherche)
Intégration de LoPSO et d’une Stratégie d’Arrêt Séquentiel
June 21, 2025 11 / 11