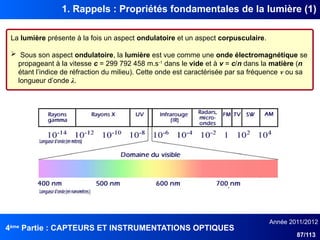
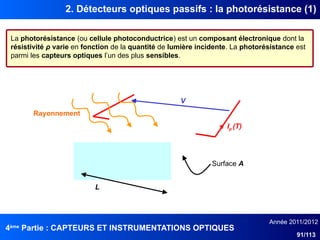
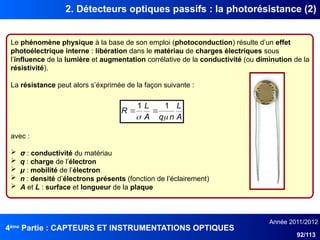
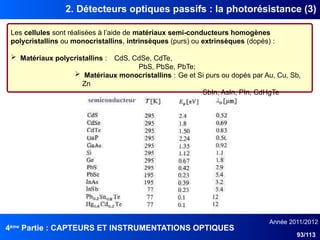
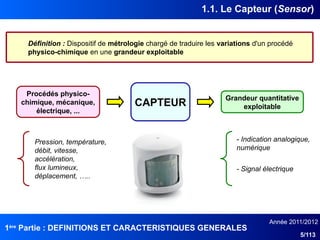
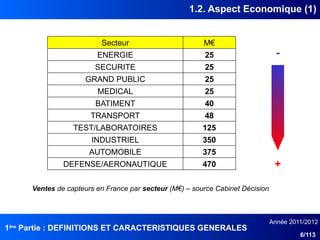
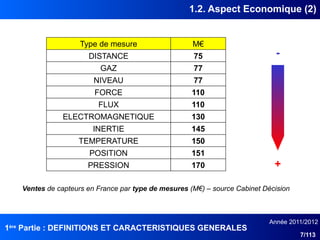
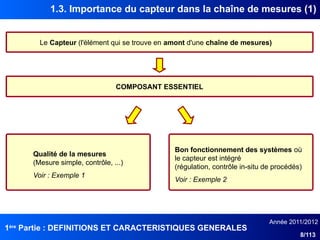
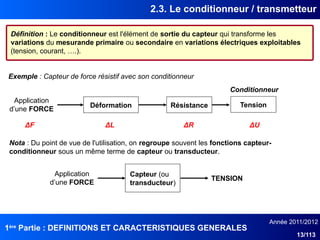
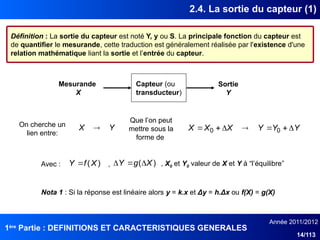
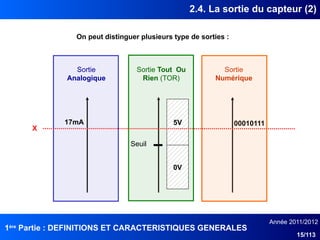
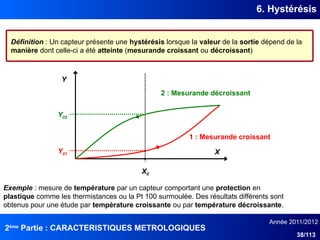
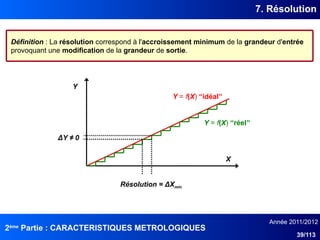
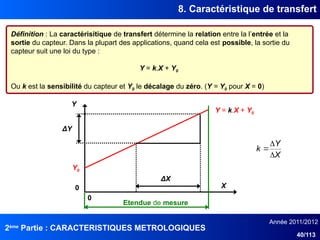
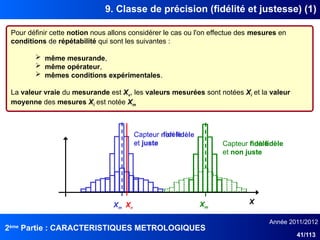
Le document présente un cours sur les capteurs et conditionneurs en instrumentation industrielle, abordant les définitions, caractéristiques générales et aspects métrologiques. Il détaille le fonctionnement des capteurs, comme les microphones à condensateur, en expliquant leur rôle dans la chaîne de mesure et l'importance d'évaluer les perturbations. Le cours fournit également des données économiques sur le marché des capteurs en France, ainsi que des applications pratiques des capteurs dans divers secteurs.



![2ème
Partie : CARACTERISTIQUES METROLOGIQUES
Année 2011/2012
53/113
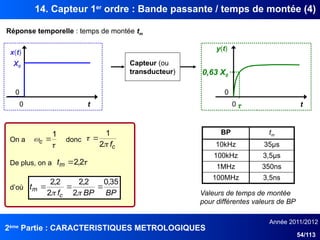
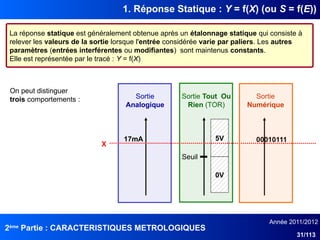
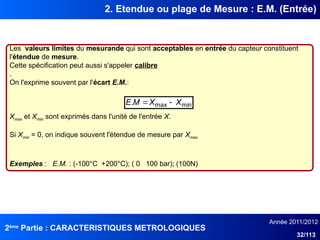
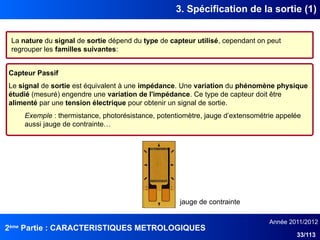
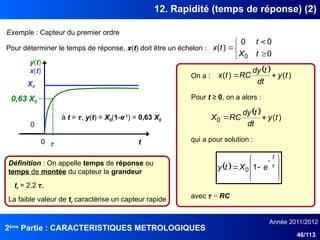
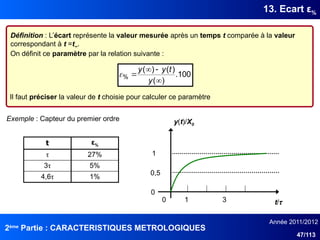
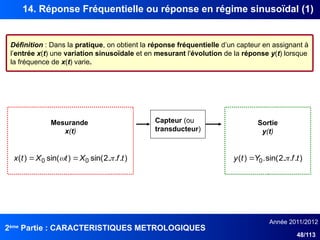
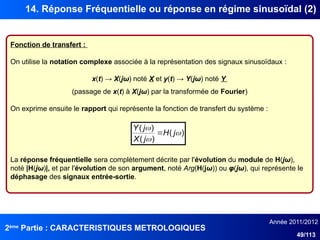
14. Capteur 1er
ordre : Bande passante / temps de montée (3)
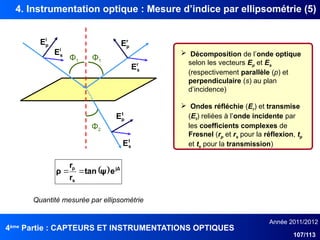
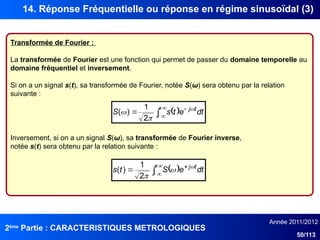
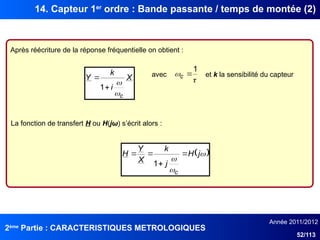
Notion de bande passante : Evolution du module de la fonction de transfert H en fonction de
la pulsation ω.
L’expression de du module de H est la suivante :
2
1
c
k
H
Bande
passante
ωc
ω
H
2
k
k
Avec ωc la pulsation de
coupure et fc la fréquence
de coupure.
On appelle l'intervalle [0-fc], la
bande passante du capteur, par
extension on appelle fc la bande
passante et on la note BP](https://image.slidesharecdn.com/courscapteurs26-241104115021-b14e6156/85/Cours_Capteurs2-6-pptx-rrrrrrrrrrrrrrrr-53-320.jpg)