Réseaux de communicationet
Applications de Contrôle-Commande
NGUYEN Xuan Hung
Soutenance de thèse, 15 décembre 2011
LAAS-CNRS, Toulouse, France
Guy JUANOLE
Gérard MOUNEY
Ye-Qiong SONG
Jean-Marc THIRIET
Germain GARCIA
Zoubir MAMMERI
Yvon TRINQUET
Professeur Emérite, Université Paul Sabatier, Toulouse
Maître de Conférences, Université Paul Sabatier, Toulouse
Professeur, Institut National Polytechnique de Lorraine, Nancy
Professeur, Université Joseph Fourier, Grenoble
Professeur, Institut National des Sciences Appliquées, Toulouse
Professeur, Université Paul Sabatier, Toulouse
Professeur, Université de Nantes
Directeurs de thèse
Rapporteurs
Examinateurs
2.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
2
Cadre de thèse
Laboratoire accueil
LAAS-CNRS (Laboratoire d’Analyse et d’Architecture des Systèmes), Toulouse
Groupes de recherche :
• OLC (Outils Logiciels pour la Communication)
• MRS (Modélisation et contrôle des Réseaux et Signaux)
Etablissement : INSA (Institut National des Sciences Appliquées ) de Toulouse
Ecole doctorale : Systèmes (EDSYS)
Directeurs de thèse
Guy JUANOLE : Professeur des universités émérite, UPS, Toulouse
Gérard MOUNEY : Maître de Conférences, UPS, Toulouse
Finances
Allocation de recherche (MESR) via INSA Toulouse (36 mois)
Contrat CNRS via LAAS-CNRS (2 mois)
Dates importantes
Date de début : 01/11/2008
Date de soutenance : 15/12/2011
15/12/2011
3.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
3
Systèmes Contrôlés en Réseau (SCR)
Systèmes pluridisciplinaires Applications de contrôle-
commande en boucle fermée dont
les composantes sont connectées
par un réseau
15/12/2011
Introduction
SCR
Réseau de
Communication
Automatique
Informatique
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
4.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
4
Problématique : partage de ressources => retard
15/12/2011
Introduction
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
contrôleur actionneur
capteur
procédé
réseau
Partage des
ressources
de calcul
(calculateurs)
retard
Partage des
ressources de
communication
(réseau)
τca
τcc
flux fca
flux fcc
5.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
5
Conception de SCR
Avant : conceptions indépendantes (Automatique, Réseau…)
=> Surdimensionnement
Actuellement : Tendances de conception conjointe (co-conception)
=>Relations Automatique-Réseau
15/12/2011
Introduction
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
6.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
6
Cadre de notre travail
Conception conjointe Automatique-Réseau (contrôle-ordonnancement de
messages)
Relation Contrôle→Réseau (QdC→QdS)
Relation Réseau→Contrôle (QdS→QdC)
Relation Contrôle↔Réseau (QdS↔QdC)
Réseaux locaux (LAN) considérés
Réseau filaire : CAN
Réseau sans fil (WLAN) technique CSMA => protocole MAC sans collision
15/12/2011
Introduction
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
QdC : Qualité de Contrôle
QdS : Qualité de Service
CAN : Control Area Network
CSMA : Carrier Sense Multiple Access
7.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
7
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN [1]
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC sur WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[1]: NGUYEN Xuan et al., WFCS 2010
8.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
8
Contexte de l’étude
Modèle de l’application de contrôle-commande (notée Appli C-C)
K = 1.8 ; Td = 0.032 s
(temps de réponse tr =100 ms ;
dépassement D = 5%)
Réseau CAN : débit 125 Kbits/s ; trame fcc et fca = 80 bits (durée Dcc = Dca = 0.64
ms); période d’échantillonnage h = 10 ms
Implantations considérées
Une Appli C-C + un flux externe (fex) périodique synchrone avec fcc
- trame du flux externe fex = 120 bits (Dex = 0.96 ms), période Tex
- charge du réseau :
Plusieurs Appli C-Cs identiques : P1, P2… Pn : les flux fcc sont synchrones
QdC : critère de performance ITSE J0
Simulateur TrueTime (Appli C-C ; Réseau)
15/12/2011
Relation QdC→QdS (réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
K
1000
s(s+1)
(1+Tds)
1/s
T
dt
t
y
t
r
t
J
0
2
))
(
)
(
(
cc ex
ex
D D D
TRU=
h h T
ca
%
J
J
%
0
0
0
J
J
J
9.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
9
Réseau CAN et mécanisme d’accès
Technique d’accès
CSMA/CA à priorité
Priorité portée par le champ ID
Priorité statique
Notion de bit : bit dominant (0), bit récessif (1)
Arbitrage
comparaison bit à bit du champ ID à partir du
bit de poids le plus fort
bit dominant écrase bit récessif
un seul vainqueur après l’arbitrage car l’unicité
de ID
15/12/2011
Relation QdC→QdS (réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
CSMA/CA : Carrier Sense Multiple Access / Collision Avoidance
10.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
10
Résultat de travaux basés sur les priorités statiques
Appli C-C : priorité du contrôleur (Pca) > priorité du capteur (Pcc)
Appli C-C et flux externe
Si priorité du fex (Pex) < Pca => application implantable
Si Pex > Pca et si charge réseau importante => application non implantable
D’où idée pour Appli C-C (régime transitoire : urgence forte de transmission ;
15/12/2011
Relation QdC→QdS (réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
11.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
11
Idée de la priorité hybride
15/12/2011
Relation QdC→QdS (réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
hybride = dynamique + statique
niveau 2 niveau 1
m bits n-m bits
niveau 1 :
unicité de flux (priorité statique)
niveau 2 :
Urgence de transmission (priorité dynamique)
Champ ID (de n bits) :
1
Quelle caractéristique
de l’application de
contrôle-commande
utiliser pour
représenter l’urgence
de transmission ?
=> Signal de commande
2
Comment traduire
une urgence de
transmission en
priorité dynamique ?
Þ Fonction du signal
de commande
12.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
12
Implantation de la priorité dynamique
15/12/2011
Relation QdC→QdS (réseau CAN)
R
E
S
E
A
U
C
A
N
Actionneur
D/A conversion
Procédé
ADC
Échantillon-
nage (h)
Attribution
de la priorité
dynamique
u
u
y
y
u
entrée Calcul du
signal de
commande
y
sortie y
Calcul de
la priorité
dynamique
(prio)
ZOH
Capteur
Contrôleur
prio
prio
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
Contrôleur calcule la priorité dynamique
Capteur utilise la priorité dynamique calculée par
le contrôleur dans la période précédente
1e
période : capteur utilise la priorité dynamique
max
13.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
13
Trois schémas de priorité hybride
Schéma ph (priorité hybride)
La priorité dynamique = fonction croissante
du signal de commande u
La priorité dynamique réévaluée à chaque
période d’échantillonnage
15/12/2011
Relation QdC→QdS (réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
une application + 1 flux externe fex : TRU = 99.2% ; besoin (niveau 2) du flux externe fex = 0.9Pmax)
14.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
14
Considération de trois schémas de priorité hybride
15/12/2011
Relation QdC→QdS (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
une application + 1 flux externe fex :
TRU = 99.2% ; besoin (niveau 2) du flux externe fex = 0.9Pmax)
ph ph+sts ph+std
Priorité
dynamique
ph+sts : ph+ stratégie temporelle statique
ph+std : ph+ stratégie temporelle dynamique
15.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
15
Réponses temporelles
15/12/2011
Relation QdC→QdS (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
une application + 1 flux externe fex :
(TRU = 99.2% ; besoin (niveau 2) du flux externe fex = 0.9Pmax)
16.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
16
Plusieurs applications de contrôle-commande
15/12/2011
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
Priorité Statique : dégradation de performance liée à l’ordre de la priorité
Priorités Hybrides
ph : le meilleur équilibre de performance
ph+sts : tendance comportementale de type des priorités statiques (influence
de la partie statique)
ph+std : compromis entre ph et ph+sts
Relation QdC→QdS (sur réseau CAN)
(5 procédés)
(4 procédés)
(Pca1 > Pca2 > Pca3 > Pca4 >Pca5 > Pcc1 > Pcc2 > Pcc3 > Pcc4 > Pcc5)
%
J
J
0
%
J
J
0
17.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
17
Conclusion
Intérêt du concept de priorité hybride pour les Appli C-Cs
Trois schémas ont été proposés : ph ; ph+sts ; ph+std
Considération d’une seule application : ph+std a la meilleure QdC
Considération d’un ensemble d’applications : ph donne le meilleur équilibre
de performance
Schéma ph utilisé dans la suite du travail
15/12/2011
Relation QdC→QdS (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
18.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
18
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN [2]
2
Relation bidirectionnelle QdS↔QdC sur WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[2]: NGUYEN Xuan, ETFA 2011
19.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
19
Introduction
Objectif : modification des paramètres du contrôleur en prenant en compte
du retard de la boucle (i.e. compensation des retards)
Modèle (sans retard) :
K =0.7291; Td = 0.0297 (marge de phase 45°)
Pôles : p1,2 = 11 ± j24.5
Fonction de transfert :
Intégration des retards dans le modèle
Retards : τcc , τca
Retard ZOH : τZOH = h/2
(ZOH : blocage d’ordre zéro)
Méthode de compensation : pôles dominants
Modification de K et Td en fonction du retard pour avoir les mêmes pôles du
système continu initial (les autres pôles devraient être négligés)
Hypothèses : priorités statiques + réseau non surchargé
15/12/2011
Relation QdS→QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
K(1+Tds) -(τca + τZOH)s
e
-τcc s
e
1000
s(s+1)
2
2
2
2
2
)
1
(
1000
)
1000
1
(
)
1
(
1000
)
(
n
n
d
n
d
d
s
s
s
T
K
s
KT
s
s
T
K
s
F
1000
s(s+1)
K(1+Tds)
1/s
20.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
20
Implantation de la relation QdS→QdC [2]
15/12/2011
Relation QdS→QdC (sur réseau CAN)
Méthode des pôles dominants
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
_ _ _ _ _ _ _ _ _ _ _ _ _ _
[2]: NGUYEN Xuan, ETFA 2011
Capteur calcule le retard tau (= τcc + τca) et l’envoi au contrôleur
Contrôleur prend le retard et calcule les paramtère
Hypothèse : actionneur et capteur dans le même site
21.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
21
2
2
2
2
)
1
(
)
(
n
n
d
n
s
s
s
T
s
F
Méthode des pôles dominants
15/12/2011
Relation QdS→QdC (sur réseau CAN)
)
1
(
1000
)
1
(
1
)
1
(
1000
)
1
(
)
(
)
(
s
s
e
s
T
K
s
s
e
s
T
K
s
F
s
d
s
d
ZOH
ca
)
1
)(
1000
)
1000
1000
(
)
1000
1
(
(
)
1
)(
1
)(
1
(
1000
)
(
2
3
b
s
Ka
s
K
a
a
KT
s
KT
a
s
b
s
a
s
s
T
Ka
s
F
d
d
d
1
2
1
2
s
s
e s
1
2
)
(
1
2
)
(
)
(
s
s
e
ZOH
ca
ZOH
ca
s
ZOH
ca
2
a
)
(
2
ZOH
ca
b
Padé approximation et
Avec
3
2
2
2
2
3
2
3
3
3
2
1 )
(
)
2
(
)
2
(
)
)(
)(
( p
I
R
s
I
R
Rp
s
p
R
s
p
s
p
s
p
s
K
R
p
a
T
a
p
I
R
K
I
R
Ra
a
a
I
R
a
R
a
p
d
1000
2
1
1000
)
(
2
)
(
)
2
2
(
3
3
2
2
2
2
2
2
2
2
3
3 )
1
)(
1
(
)
1
)(
1
(
2
)
1
(
)
(
3
2
2
2
b
s
p
s
b
s
a
s
s
s
s
T
s
F
n
n
d
n
avec Td = fonction de retard
Remarque : Td augmente avec retard => zéro z = -1/Td approche de l’origine
=> ceci augmente le dépassement
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
On trouve :
)
24
;
11
(
2
,
1
I
R
jI
R
p
où
22.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
22
Résultats
Implantation de 4 Appli C-Cs ;
priorités statiques : Pca1 > Pca2 > Pca3 > Pca4 > Pcc1 > Pcc2 > Pcc3 > Pcc4
Visualisation de l’influence de la compensation des retards
Contrôleur fixe : pas de modification de K et Td
Contrôleur adaptatif : K et Td sont modifiés par la méthode des pôles dominants
15/12/2011
Relation QdS→QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
Contrôleur fixe Contrôleur adaptatif
Cause de zéro
23.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
23
Conclusion
Mise en œuvre de la relation QdS→QdC : méthode des pôles dominants
=> amélioration de la QdC
Implantation de plusieurs applications : pas de performances identiques
pour les applications à cause du zéro (z = -1/Td)
15/12/2011
Relation QdS→QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
24.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
24
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN [3]
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[3]: NGUYEN Xuan et al., WFCS 2012 (soumis)
25.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
25
Introduction
Objectif : Combinaison des relations QdC→QdS et QdS→QdC
Problème : priorité hybride => retard variable => relation QdS→QdC définie ne
peut pas être implantée
Solution ? Implémentabilité si le contrôleur connait le retard de la période actuelle
Les retards de la période actuelle :
τcc peut être calculé par le contrôleur
τZOH est toujours fixe (= h/2)
τca est maintenant inconnu => il faut l’anticiper
Proposition : contrôleur utilise la priorité dynamique maximale
=> envoi immédiat (temps de calcul est négligé)
=> τca est égal à la durée de transmission de la trame du contrôleur (τca =
Dca)
=> Retard de la boucle est disponible au site Contrôleur
=> Relation QdS→QdC (méthode des pôles dominant) est
15/12/2011
Relation QdS↔QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
26.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
26
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[3]: NGUYEN Xuan et al., WFCS 2012 (soumis)
Implantation de la relation QdS↔QdC [3]
15/12/2011
Relation QdS↔QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
relation QdC→QdS
relation QdS→QdC
27.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
27
Résultats : récapitulation
15/12/2011
Relation QdS↔QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
%
J
J
0
28.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
28
Conclusion sur le réseau CAN
On a montré la faisabilité de la mise en œuvre de la conception conjointe en
utilisant la priorité hybride pour l’ordonnancement de messages et la
méthode des pôles dominants pour la compensation de retard.
15/12/2011
Relation QdS↔QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
29.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
29
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN[4, 5]
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC (WLAN)
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[4] : NGUYEN Xuan et al., GLOBECOM – SaCoNAS 2010 ; [5] : NGUYEN Xuan et al., ETR 2011
30.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
30
Introduction
Strict CSMA : potentialité de situation de collision
Situation de collision due à l’ambiguïté de l’expression << médium libre à
un temps t >> car vue locale de l’état du médium (pas de vue globale)
Le concept de << fenêtre d’ambiguïté >> = durée maximale possible entre
l’envoi d’une trame par un nœud et l’occurrence d’une collision sur cette
trame.
Objectif d’un protocole sans collision : supprimer les situations de collision
en utilisant les priorités
c.-à-d. Transformer situations de collision situations << vainqueur-vaincu(s) >>
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
31.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
31
Fenêtre d’ambiguïté
Eléments importants de la couche physique :
temps de propagation : τPT
temps de retournement : τTT
temps de détection (sensing time) : τST
Visualisation de la fenêtre d’ambiguïté
Largeur de la fenêtre d’ambiguïté = τTT + τPT
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
32.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
32
Protocoles MAC à priorité : 2 approches
Technique BlackBurst
messages d’annonce (messages BlackBurst) envoyés avant les trames
longueur de messages d’annonce proportionnelle à la priorité
Adaptation du protocole CAN au réseau sans fil (appellé CANlike)
Ici on ne présente que CANlike
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
33.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
33
CANlike (1)
Adaptation du protocole CAN au contexte sans fil (1)
Problème
dans réseau sans fil, on ne peut pas émettre et écouter en même temps
Solution
bit dominant : porteuse (signal d’énergie) émise sur canal
bit récessif : écoute du canal
Tournoi
bit dominant : il émet une porteuse et continue le tournoi avec le bit suivant du
champ ID (nœud gagnant par définition)
bit récessif : nœud écoute le canal
• si’il détecte la porteuse (donc est perdant et ne continue pas)
• s’il ne détecte rien (pas de bit dominant émis par un autre nœud) , il continue le tournoi
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
34.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
34
CANlike (2)
Nécessité d’un signal de synchronisation avant le tournoi
annoncer aux autres nœuds l’arrivé des bits du champ ID
Nécessité d’un temps de garde (tg) après signal de synchronisation et bit ID
Il faut déterminer les durées du signal de synchronisation (ls), de bit ID (lb) et du
temps de garde (tg)
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
35.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
35
CANlike (3)
Evaluation du temps de garde (tg)
Situation
Nœud i décide d’envoyer ls à l’instant t
Nœud j i décide d’envoyer ls à l’instant t + (τTT + τPT ) (décalage = largeur de la fenêtre)
Temps de garde = dépassement du signal ls envoyé par nœud i par la
propagation du signal l envoyé par nœud j => t = 2τ + τ
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
36.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
36
CANlike (4)
Evaluation des bits du champ ID (lb), durée ls
Scénario : un nœud a un bit dominant ; un nœud a un bit récessif (écoute)
Contrainte : nœud j doit détecter le signal venant de nœud i
Cas 1 : lb ≥ τTT + τST Cas 2 : lb ≥ 2τPT + τTT + τST => lb = 2τPT + τTT + τST
Remarque : on prend ls = lb
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Cas 2
Cas 1
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
37.
S
C
R
37
CANlike (5)
Médiumdoit être libre pendant un temps TOBS avant d’émettre le signal de
synchronisation et le champ ID de la trame
Objectif : interdire l’insertion dans une transaction en cours
Contrainte : TOBS supérieur à n bits ID => TOBS > n(lb + tg)
On prend TOBS = (n+1)(lb + tg)
Phase de compétition = TOBS + Synchronisation + Arbitrage
= 2(n+1)(lb + tg)
Implanté dans TrueTime
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
38.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
38
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN [6]
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[6]: NGUYEN Xuan et al., ETFA 2012 (en cours de rédaction)
39.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
39
Contexte
Même Appli C-C que celle considérée précédemment
Champ ID = 8 bits
Priorité hybride :
4 bits pour niveau dynamique, 4 bits pour niveau statique
schéma ph+
= schéma ph + priorité dynamique max pour contrôleur
Implantation de 4 applications identiques (synchrones)
niveau statique : Pca1 > Pca2 > Pca3 > Pca4 > Pcc1 > Pcc2 > Pcc3 > Pcc4
WiFi : 1Mbits/s; trame de données 480 bits, DCF = 50µs,
Paramètres CANlike : lb = 20 µs; tg = 5µs, même vitesse, durées de trames
que WiFi
Critère J
15/12/2011
Relation bidirectionnelle QdS↔QdC WLAN
1000
s(s+1)
K(1+Tds)
1/s
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
40.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
40
Evaluation de performance : CANlike
15/12/2011
Relation bidirectionnelle QdS↔QdC WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
%
J
J
0
Priorité statique
Contrôleur fixe
QdC→QdS :
Priorité dynamique
Contrôleur fixe
QdC→QdS :
Priorité statique
Contrôleur adaptatif
QdC↔QdS :
Priorité dynamique
Contrôleur adaptatif
WiFi
41.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
41
Conclusion
Faisabilité de la relation QdS↔QdC sur un réseau local sans fil avec un
protocole MAC CSMA sans collision (CANlike)
Meilleure performance que WiFi
15/12/2011
Relation bidirectionnelle QdS↔QdC WLAN
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
42.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
42
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN [6]
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[6]: NGUYEN Xuan et al., ETFA 2012 (en cours de rédaction)
43.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
43
Conclusion
Contributions :
Définition de priorités hybrides dont la partie dynamique permet de capter
l’urgence de transmission des appli C-Cs
Relation QdC→QdS
Meilleure équité que si priorité statique
Mise en ouvre de la relation QdS↔QdC :
priorité dynamique
pôles dominants
Réseau sans fil : spécification des protocoles MAC CSMA sans collision
applications temps réel
Mise en ouvre sur réseaux sans fil de la relation QdS↔QdC
15/12/2011
Conclusion et perspectives
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
44.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
44
Perspectives
Aspect réseau
Faisabilité des protocoles MAC sans collision aux réseaux sans fil multi sauts
Aspect automatique
Considération de plusieurs types d’appli C-C et types de réseau correcteur
Autres méthodes de compensation
15/12/2011
Conclusion et perspectives
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
45.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
45
15/12/2011
46.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Co
ntrôle-Commande
15/12/2011 Slide
ph+std
Profil de référence P(t): une fonction
décroissante qui fixe les priorités dynamiques
aux instants d’échantillonnage
Stratégie de supervision temporelle en utilisant
la fonction g(u)
Algorithme: à l’instant 0, P = Pmax; à partir
de l’instant 1, on fait:
1. Calcul de g(u)
2. Calcul de
tk = tk-1 + h – αg(u) avec α= tk-1/tr (0 ≤ α ≤1)
(a) si tk < 0 alors tk = 0
(b) si tk > tr , tk = tr
3. Calcul P = P(tk)
47.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Co
ntrôle-Commande
15/12/2011 Slide
ph+std
h-αg(u)>0 h-αg(u)<0
Même priorité: h-αg(u)=0
tk = tk-1 + h – αg(u)
48.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
48
Protocole CANlike : phase d’arbitrage
Bus CAN CANlike (réseau sans fil)
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
49.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
49
Protocole MAC basé sur BB
Sur la base de priorités statiques
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Médium
libre pendant
TOBS1 ?
Envoi du
message d’annonce
Envoi de la
trame de données
Médium
libre pendant
TOBS2 ?
oui
non
oui
non
longueur = kTBB
(k = priorité ;
TBB = temps d’un BB)
retournement
retournement
50.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
50
Protocole MAC basé sur BB : TBB, TOBS2, TOBS1
Scénario à considérer
Contraintes :
nœud i : nœud i doit être vainqueur => TBB ≥ 2τPT + τTT
nœud j : nœud j doit être vaincu => TBB ≥ 2τPT + τST
TOBS2 : considérer le dépassement (sur j) du signal BB de j par le signal
BB venant de i => TOBS2 = 2τPT + τST
TOBS1 > TOBS2 d’au moins un τST pour pouvoir détecter correctement
l’état du canal => TOBS1 = 2τPT + 2τPT + 2τST
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
TOBS2
TBB ≥ 2τPT + 2τTT + τST
51.
S
C
R
NGUYEN Xuan-Hung |Réseaux de Communication et Applications de Contrôle-Commande
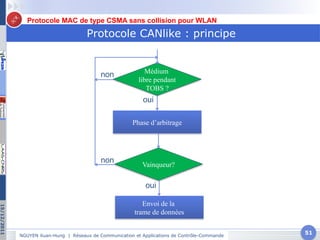
51
Protocole CANlike : principe
15/12/2011
Protocole MAC de type CSMA sans collision pour WLAN
Médium
libre pendant
TOBS ?
Phase d’arbitrage
Envoi de la
trame de données
Vainqueur?
oui
non
oui
non






![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
7
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN [1]
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC sur WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[1]: NGUYEN Xuan et al., WFCS 2010](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-7-320.jpg)










![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
18
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN [2]
2
Relation bidirectionnelle QdS↔QdC sur WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[2]: NGUYEN Xuan, ETFA 2011](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-18-320.jpg)

![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
20
Implantation de la relation QdS→QdC [2]
15/12/2011
Relation QdS→QdC (sur réseau CAN)
Méthode des pôles dominants
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
_ _ _ _ _ _ _ _ _ _ _ _ _ _
[2]: NGUYEN Xuan, ETFA 2011
Capteur calcule le retard tau (= τcc + τca) et l’envoi au contrôleur
Contrôleur prend le retard et calcule les paramtère
Hypothèse : actionneur et capteur dans le même site](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-20-320.jpg)



![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
24
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN [3]
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[3]: NGUYEN Xuan et al., WFCS 2012 (soumis)](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-24-320.jpg)

![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
26
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[3]: NGUYEN Xuan et al., WFCS 2012 (soumis)
Implantation de la relation QdS↔QdC [3]
15/12/2011
Relation QdS↔QdC (sur réseau CAN)
Relation QdC→QdS (CAN) Relation QdS↔QdC (CAN)
Protocoles MAC de type CSMA sans collision pour WLAN Conlusion et perspectives
Introduction Relation QdS→QdC (CAN)
Relation QdS↔QdC (WCAN)
relation QdC→QdS
relation QdS→QdC](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-26-320.jpg)


![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
29
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN[4, 5]
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC (WLAN)
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[4] : NGUYEN Xuan et al., GLOBECOM – SaCoNAS 2010 ; [5] : NGUYEN Xuan et al., ETR 2011](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-29-320.jpg)








![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
38
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN [6]
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[6]: NGUYEN Xuan et al., ETFA 2012 (en cours de rédaction)](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-38-320.jpg)



![S
C
R
NGUYEN Xuan-Hung | Réseaux de Communication et Applications de Contrôle-Commande
42
Sommaire
Conclusion et perspectives
Protocoles MAC de type CSMA sans collision pour WLAN
Relation bidirectionnelle QdS↔QdC sur le réseau CAN
Relation QdC→QdS sur le réseau CAN
Introduction
15/12/2011
0
1
3
4
6
Relation QdS→QdC sur le réseau CAN
2
Relation bidirectionnelle QdS↔QdC WLAN [6]
5
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
[6]: NGUYEN Xuan et al., ETFA 2012 (en cours de rédaction)](https://image.slidesharecdn.com/phdpresentationxhnguyen1-251005211013-fede2bcf/85/PhDpresentationphdpresentationde-doctorat-pptx-42-320.jpg)