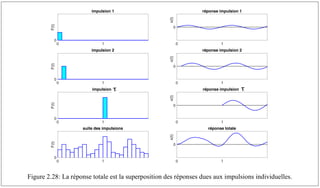
Le document traite des forces dynamiques et de leur modélisation à travers des impulsions successives, suivant la deuxième loi de Newton. Il présente l'intégrale de convolution de Duhamel pour déterminer la réponse d'un système aux forces appliquées brusquement, en particulier dans le contexte de forces de type impulsionnel comme les chocs et les explosions. Il aborde également des cas spécifiques de forces constantes et linéaires, ainsi que leur impact sur la réponse dynamique des oscillateurs.








![L’expression de la force peut être décomposée en deux parties de la manière suivante:
pour
pour
La réponse s’exprime également en deux parties. Dans le cas sans amortissement (ζ=0), on obtient:
(2.44)
(2.45)
Les deux premiers termes correspondent aux oscillations libres avec les conditions initiales ( et
) en tr. Le 3e terme correspond à une force appliquée brusquement à l’instant tr.
F t
( ) F0
t
tr
--
-
⋅
= t tr
≤
F t
( ) F0
= t tr
x t
( )
1
m ω
⋅ n
---------------
-
F0
tr
-----
- τ ωn t τ
–
( ) τ
d
⋅
sin
⋅ ⋅
0
t
∫
⋅
F0
k
-----
-
t
tr
--
-
ωn
sin t
ωn tr
⋅
----------------
–
⎝ ⎠
⎜ ⎟
⎛ ⎞
⋅
= = t tr
≤
x t
( )
x
·
tr
( )
ωn
----------- ωn t tr
–
( )
sin
⋅ x tr
( ) ωn t tr
–
( )
cos
⋅
F0
k
-----
-
+ + 1 ωn t tr
–
( )
cos
–
[ ]
⋅
= t tr
x
·
tr
( )
x tr
( )](https://image.slidesharecdn.com/04transp4newnewnew-230304213313-94629456/85/04_Transp_4_NEWNEWNEW-pdf-11-320.jpg)
![L’expression de la réponse après la stabilisation de la force (ttr) peut également être déterminée avec
la superposition; i.e. la soustraction de deux forces variant linéairement et décalée dans le temps de tr:
pour
Connaissant la réponse pour une force linéaire, la réponse après stabilisation de la force (ttr) devient:
(2.46)
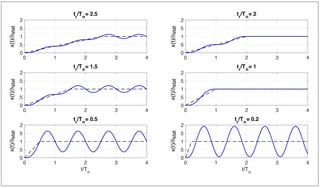
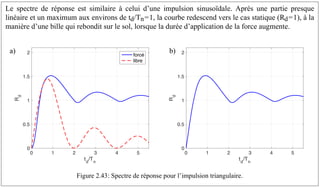
L’amplitude de la réponse dynamique est plus ou moins accentuée selon la rapidité de l’augmentation
de la force. Elle est maximale pour une augmentation très rapide (petits rapports tr/Tn) et elle s’atténue
avec l’extension de la durée de l’augmentation de la force. Pour certains cas particuliers, le système
n’oscille plus après que la force se soit stabilisée. Cette situation survient pour des valeurs entières du
rapport (tr/Tn), car dans ce cas, le système atteint sa nouvelle position d’équilibre avec une vitesse nulle
exactement au moment où la force se stabilise.
F t
( ) F0 F0
t
tr
--
-
⋅ F0
t tr
–
tr
----------
-
⎝ ⎠
⎜ ⎟
⎛ ⎞
⋅
–
= = t tr
x t
( )
F0
k
-----
- 1
ωn
sin t
ωn tr
⋅
----------------
–
ωn t tr
–
( )
sin
ωn tr
⋅
------------------------------
-
+
⎝ ⎠
⎜ ⎟
⎛ ⎞
δstat 1
1
ωn tr
⋅
--------------
-
– ωn
sin t ωn t tr
–
( )
sin
–
[ ]
⋅
⎝ ⎠
⎛ ⎞
⋅
=
⋅
=](https://image.slidesharecdn.com/04transp4newnewnew-230304213313-94629456/85/04_Transp_4_NEWNEWNEW-pdf-12-320.jpg)





































![Cours Cercle de Mohr[Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/courscercledemohrcompatibilitymode-220515142635-81e12a2c-thumbnail.jpg?width=640&height=640&fit=bounds)















