Le document traite de la transmissibilité des forces dans un système oscillant soumis à des forces harmoniques, en définissant des facteurs d'amplification dynamique (rf et rd) selon des conditions d'amortissement. Il explore également l'équivalence dynamique entre des systèmes fixes et ceux soumis à des mouvements de fondation, en illustrant ces concepts par des équations différentielles et des exemples concrets, comme le cas d'un véhicule sur une chaussée déformée. Les principes et applications de ces facteurs sont expliqués, notamment en lien avec des situations de vibrations causées par des séismes ou du trafic.








![2.5.5 Exemple
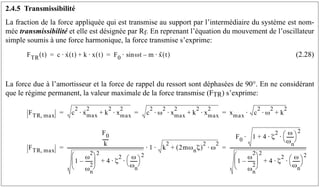
Un exemple de mouvement de la fondation intervient pour un véhicule circulant sur une chaussée défor-
mée qui peut être approximée par une fonction sinusoïdale d’amplitude de xg0=7.5 cm. Le viaduc est
constitué de travées identiques de 30 m de longueur et le véhicule roule à 70 km/h. La masse de la voi-
ture est de m=2000 kg. La suspension fournit une constante de ressort de k=145 kN/m et un coefficient
d’amortissement de ζ=40%. En faisant l’hypothèse que les pneus sont rigides et ne décollent pas de la
chaussée, on peut déterminer les déplacements verticaux que subit le véhicule de la manière suivante:
propriétés dynamiques: ;
facteur d’amplification:
déplacement dynamique:
Ce n’est pas la situation la plus défavorable, car le facteur Rf peut être plus grand si la vitesse du véhi-
cule est plus élevée. Le facteur Rf atteint son maximum pour une vitesse de 131 km/h.
ωn
k
m
---
-
145 10
3
⋅
2000
---------------------
- 8.51 rad/s
[ ]
= = = ω 2π
70 3.6
⁄
30
----------------
-
⋅ 4.07 rad/s
[ ]
= =
Rf
1 4 ζ
2
ω ωn
⁄
( )
2
⋅ ⋅
+
1 ω ωn
⁄
( )
2
–
( )
2
4 ζ
2
ω ωn
⁄
( )
2
⋅ ⋅
+
-----------------------------------------------------------------------------------------
-
1 4 0.16 0.229
⋅ ⋅
+
0.771
2
0.1466
+
------------------------------------------------
- 1.24
= = =
xmax Rf
= x
⋅
g0
1.24 7.5 10
2
–
⋅ ⋅ 9.3 10
2
–
m
[ ]
⋅
= =](https://image.slidesharecdn.com/coursdynam-220515142547-150b4e0d/85/cours-dynam-pdf-10-320.jpg)

































![Cours Cercle de Mohr[Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/courscercledemohrcompatibilitymode-220515142635-81e12a2c-thumbnail.jpg?width=640&height=640&fit=bounds)










