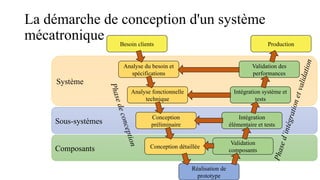
Ce document présente une introduction à la mécatronique, qui combine plusieurs disciplines pour répondre aux exigences industrielles modernes en matière de performance, de confort et de sécurité. Il décrit également l'historique de la mécatronique, ses définitions variées, ainsi que les types de systèmes mécatroniques, dont les applications s'étendent de l'automatisation domestique à l'aéronautique et à la recherche spatiale. Enfin, il aborde la démarche de conception et l'importance de la modélisation et de la simulation dans le développement des systèmes mécatroniques.