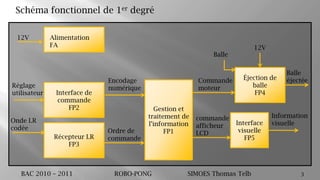
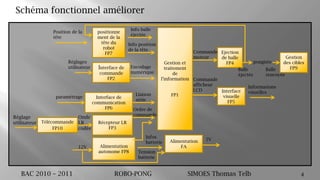
Le document présente un projet de robot de ping-pong, Robo-Pong, développé par Thomas Simoes pour son Bac en 2010-2011. Il décrit les différentes fonctionnalités et composants de la machine, y compris l'éjection de balles, la gestion des cibles et les interfaces de commande. Le projet inclut des schémas fonctionnels et une attention particulière à l'autonomie et aux réglages utilisateurs.