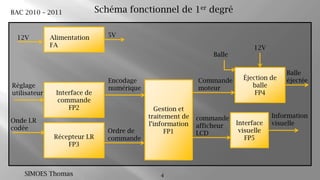
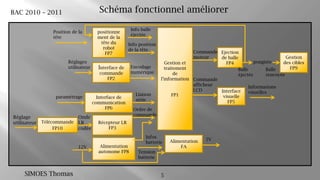
Le document présente un projet de robot d'entraînement au ping-pong, nommé robo-pong, conçu pour améliorer les compétences des joueurs en leur permettant de s'entraîner de manière efficace. Il décrit les différents schémas fonctionnels, l'interface de commande et les aspects techniques, tels que l'éjection des balles et la gestion des informations. Enfin, le projet inclut des fonctionnalités pour régler les paramètres selon les besoins de l'utilisateur.