Le document présente un projet sur Arduino, un système permettant de créer des systèmes électroniques divers, adapté aux débutants et professionnels. Il décrit les types de cartes Arduino, les capacités de programmation via l'IDE Arduino, ainsi que les méthodes de communication et de gestion des entrées/sorties. Enfin, il inclut des exemples de programmation et d'applications dans des projets variés.






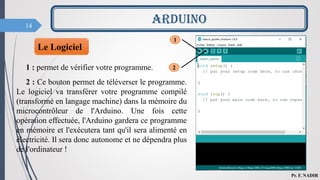






















![diaporama presentation arduino [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/diaporamapresentationarduinomodedecompatibilit-221127093339-7f2597f7-thumbnail.jpg?width=640&height=640&fit=bounds)






