Chapitre 1 :Différents types de conversion électrique –
mécanique
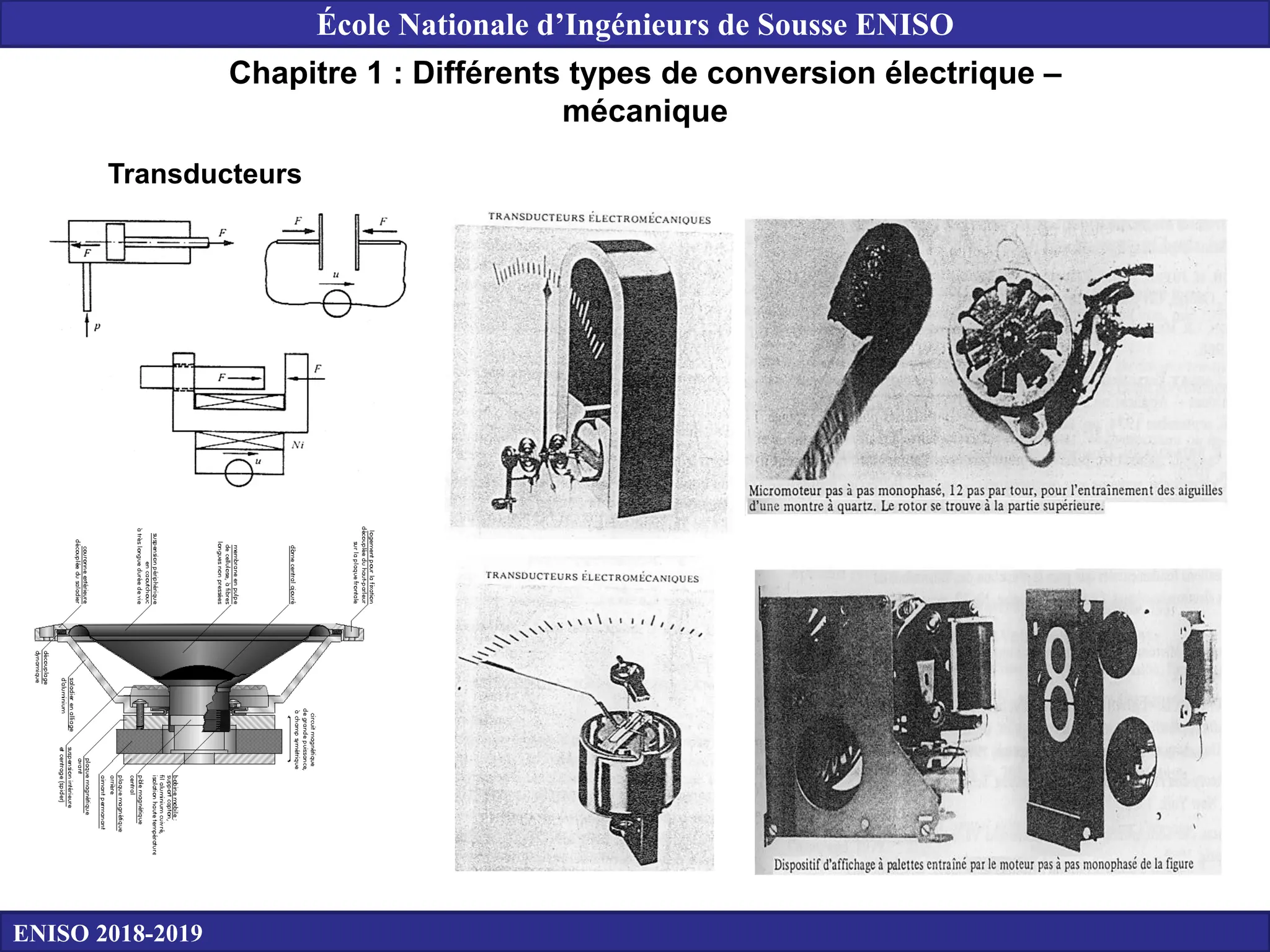
Transducteurs
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
2.
1.1 Principes
Besoin etévolution
L’homme à la recherche des moyens pour se faire, remplacer, pour les travaux pénibles.
D’où l’invention des machines : de plus en plus : puissantes, rapides et intelligentes.
Depuis 1970, on assiste à une explosion des applications des servomécanismes
électriques : (machines à commande numérique, robots) dans les différents
domaines.
Les nouveaux actionneurs sont caractérisés par :
des constantes de temps électriques et mécaniques de plus en plus réduites (grâce aux
structures nouvelles).
des puissances massiques accrues (de 10 à 100)
intégration croissante des aimants permanents et sans pertes (terres rares)
des alimentations statiques de tension ou de courant à module et fréquence
variables
des lois de commande sophistiquées et numériques grâce aux microcontrôleurs, DSP et
les circuits programmables (ASIC, VHDL,..)
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
3.
1.2 Certaines formesd’actionneurs
Il existe trois types d’actionneurs :
Transducteurs : dispositif qui assure un transfert ou une conversion d’énergie
avec l’élaboration d’une information. L’information, le signal, prime sur l’énergie
Actionneur électromécanique : est un transducteur qui assure une
conversion d’énergie et d’information de la forme électrique à la forme
mécanique. Donc un actionneur électrique se présente sous la forme d’un
moteur électrique généralement. Mais selon l’application, l’aspect déterminant
pourra être l’énergie ou la qualité du signal
Capteur électromécanique : est un transducteur qui transforme un
mouvement quelconque en information électrique. Il opère une conversion
d’énergie mais celle-ci est très faible pour ne pas perturber le phénomène
mesuré. Exemple : dynamo tachymétrique
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
4.
1.3 Environnement
Source d’information
(Référenceprogrammée)
Commande Alimentation Source d’énergie
Capteurs Actionneur
Réducteur de
vitesse
Charge
1.4 Comparaison des performances
Les systèmes les plus courants sont basés sur
Soit de la pression hydropneumatique (actionneurs à membranes ou à pistons)
Soit de la pression électrostatique (actionneurs à condensateur sous tension
électrique)
Soit de la pression électromagnétique (actionneurs à circuit magnétique et
bobine parcourue par un courant électrique)
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
5.
Premier critère decomparaison :
L’énergie volumique disponible dans la partie utile des ces actionneurs.
Cette énergie volumique s’exprime en J/m3, et s’identifie donc à une
pression en N/m2.
en hydropneumatique la valeur maximale usuelle des pressions utilisées
est de l’ordre 400 bar ce qui correspond à une énergie volumique de
PH = 4.107 J/m3
en électrostatique cette pression s’exprime en 0.5E2 et dans l’air le champ
électrique maximal supporté, avant claquage est de l’ordre de 3.106 V/m ce
qui conduit à une énergie volumique de Pes = 40J/m3
en électromagnétisme cette pression s’exprime par et les inductions
courantes dans l’air sont de l’ordre de 1T. Ce qui donne une énergie
volumique de Pem = 4.105 J/m3
2
2
B
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
6.
En résumé onobtient : PH = 102 Pem = 106 Pes
Ce qui explique, d’une part l’usage des systèmes hydraulique et pneumatiques
avant celui des systèmes électromagnétiques, étudiés beaucoup plus tard, et
d’autre part le peu d’usage des systèmes électrostatiques.
Second critère de comparaison
La rapidité de réponse ou la fréquence maximale du mouvement périodique
produit :
en hydropneumatique FH < 100 Hz
en électromagnétisme Fem < 100 kHz
en électrostatique Fes < 1 MHz
Si l’on conjugue les deux critères, pour parler de la puissance volumique,
alors :
Pem . Fem = 10 PH FH = 103.Pes Fes
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
7.
1.5 Autres systèmesde conversion
Il existe d’autres principes de conversion d’énergie qui fournissent de
l’énergie mécanique.
On peut citer :
les systèmes magnétostrictifs qui utilisent le fait que certains matériaux
magnétiques se contracte ou se dilatent sous l’effet d’un champ
magnétique.
les systèmes électrostrictifs, dits encore piézoélectrique, qui utilisent la
variation de dimension de certains matériaux sous l’effet d’un champ
électrique. Les systèmes piézoélectriques reçoivent un important début
d’industrialisation
les systèmes électrostatiques, condamnés précédemment, resurgissent
grâce aux techniques de microfabrication développées en micro-électrique
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
8.
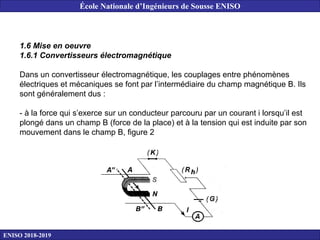
1.6 Mise enoeuvre
1.6.1 Convertisseurs électromagnétique
Dans un convertisseur électromagnétique, les couplages entre phénomènes
électriques et mécaniques se font par l’intermédiaire du champ magnétique B. Ils
sont généralement dus :
- à la force qui s’exerce sur un conducteur parcouru par un courant i lorsqu’il est
plongé dans un champ B (force de la place) et à la tension qui est induite par son
mouvement dans le champ B, figure 2
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
9.
à laforce qui s’exerce sur un corps en matériau ferromagnétique s’il est plongé
dans le champ B produit par le courant j circulant dans une spire et à la tension
qui est induite dans cette spire par la variation du flux qu’elle intercepte lorsque le
corps magnétique est en mouvement
Remarque :
la force électromagnétique peut résulter aussi de l’interaction entre un aimant
permanent et un courant ou un circuit ferromagnétique. La dernière configuration
ne permet pas de commande (absence de courant) ne peut être exploitée seule.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
10.
1.6.2 Convertisseurs électrostatique
Dansun convertisseur électrostatique, les couplages entre phénomènes
électriques et mécaniques se font par l’intermédiaire du champ électrique E. il
sont généralement dus :
à la force qui s’exerce sur un corps porteur d’une charge Q, lorsqu’il est
plongé dans un champ E et à la variation de son potentiel électrique suite à son
mouvement dans le champ E, figure 3
à la force qui s’exerce sur un corps diélectrique s’il est plongé dans le champ
E produit par la tension appliquée entre deux électrodes et au courant (variation
de charge) absorbé par ces électrodes, suite à la variation du flux électrique
qu’elles interceptent lorsque le corps diélectrique est en mouvement
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
11.
1.6.3 Convertisseurs piézoélectriqueet magnétostrictifs
En dehors des convertisseurs où les interactions électromécaniques sont liées au champ B ou au
champ E, on trouve également des convertisseurs dont le principe de fonctionnement repose sur les
propriétés qu’ont certains matériaux de réagir mécaniquement à des grandeurs électriques ou
magnétiques. C’est le cas des matériaux piézoélectriques ou magnétostrictifs.
Les matériaux piézoélectriques ont la propriété de se déformer sous l’action du champ électrique
produit par l’application d’une différence de potentiel entre deux armatures conductrices.
Réciproquement, l’application de contraintes mécaniques à ce type de matériau y développe une
polarisation électrique qui peut conduire à l’apparition d’une différence de potentiel entre deux
armatures conductrices.
Certains matériaux ferromagnétiques soumis à un champ magnétique subissent des déformations ou
des modifications de propriétés mécaniques (module d’élasticité). Réciproquement, des contraintes
mécaniques peuvent entraîner des modifications des propriétés magnétiques de ces matériaux. Ces
phénomènes sont désignés sous le nom de magnétostriction. Dans les convertisseurs piézoélectriques
ou magnétostrictifs, les phénomènes qu’on vient d’indiquer sont utilisés pour transformer des
grandeurs électriques en grandeurs mécaniques ou obtenir des grandeurs électriques images de
grandeurs mécaniques
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
12.
1.7 Constituant magnétiques
1.7.1Circuit magnétique
En vertu de l’analogie entre circuit électrique et circuits magnétiques, tableau1,
il est usuel d’associer une représentation schématique par circuit électrique à
tout réseau magnétique. Les principales grandeurs caractéristiques d’un
schéma magnétique équivalent sont : la source de potentiel magnétique, la
liaison de réluctance nulle, la réluctance ou perméance et le flux, figure 4.
Rm
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
13.
Exemple 1 :
Unélectro-aimant présentant deux entrefers, figure 5, est excité par un bobinage
concentrique à la colonne centrale. Le fer présente une perméabilité relative
r = 500.
Il s’agit de déterminer l’induction dans chacun des entrefers pour un courant de
15A circulant dans le bobinage de 120 spires.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
14.
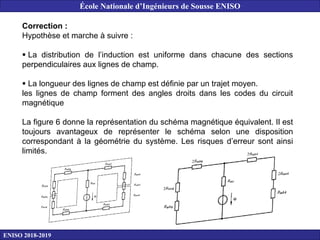
Correction :
Hypothèse etmarche à suivre :
La distribution de l’induction est uniforme dans chacune des sections
perpendiculaires aux lignes de champ.
La longueur des lignes de champ est définie par un trajet moyen.
les lignes de champ forment des angles droits dans les codes du circuit
magnétique
La figure 6 donne la représentation du schéma magnétique équivalent. Il est
toujours avantageux de représenter le schéma selon une disposition
correspondant à la géométrie du système. Les risques d’erreur sont ainsi
limités.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
15.
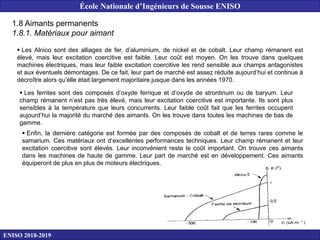
1.8 Aimants permanents
1.8.1.Matériaux pour aimant
Les Alnico sont des alliages de fer, d’aluminium, de nickel et de cobalt. Leur champ rémanent est
élevé, mais leur excitation coercitive est faible. Leur coût est moyen. On les trouve dans quelques
machines électriques, mais leur faible excitation coercitive les rend sensible aux champs antagonistes
et aux éventuels démontages. De ce fait, leur part de marché est assez réduite aujourd’hui et continue à
décroître alors qu’elle était largement majoritaire jusque dans les années 1970.
Les ferrites sont des composés d’oxyde ferrique et d’oxyde de strontinum ou de baryum. Leur
champ rémanent n’est pas très élevé, mais leur excitation coercitive est importante. Ils sont plus
sensibles à la température que leurs concurrents. Leur faible coût fait que les ferrites occupent
aujourd’hui la majorité du marché des aimants. On les trouve dans toutes les machines de bas de
gamme.
Enfin, la dernière catégorie est formée par des composés de cobalt et de terres rares comme le
samarium. Ces matériaux ont d’excellentes performances techniques. Leur champ rémanent et leur
excitation coercitive sont élevés. Leur inconvénient reste le coût important. On trouve ces aimants
dans les machines de haute de gamme. Leur part de marché est en développement. Ces aimants
équiperont de plus en plus de moteurs électriques.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
16.
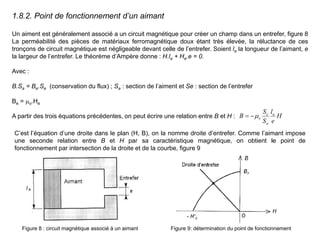
1.8.2. Point defonctionnement d’un aimant
Un aiment est généralement associé a un circuit magnétique pour créer un champ dans un entrefer, figure 8
La perméabilité des pièces de matériaux ferromagnétique doux étant très élevée, la réluctance de ces
tronçons de circuit magnétique est négligeable devant celle de l’entrefer. Soient la la longueur de l’aimant, e
la largeur de l’entrefer. Le théorème d’Ampère donne : H.la + He.e = 0.
Avec :
B.Sa = Be.Se (conservation du flux) ; Sa : section de l’aiment et Se : section de l’entrefer
Be = o.He
A partir des trois équations précédentes, on peut écrire une relation entre B et H : H
e
l
S
S
B a
a
e
o
C’est l’équation d’une droite dans le plan (H, B), on la nomme droite d’entrefer. Comme l’aimant impose
une seconde relation entre B et H par sa caractéristique magnétique, on obtient le point de
fonctionnement par intersection de la droite et de la courbe, figure 9
Figure 8 : circuit magnétique associé à un aimant Figure 9: détermination du point de fonctionnement
17.
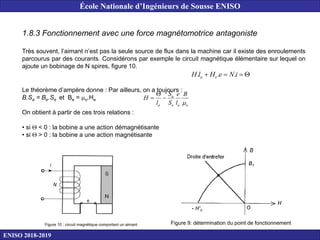
1.8.3 Fonctionnement avecune force magnétomotrice antagoniste
Très souvent, l’aimant n’est pas la seule source de flux dans la machine car il existe des enroulements
parcourus par des courants. Considérons par exemple le circuit magnétique élémentaire sur lequel on
ajoute un bobinage de N spires, figure 10.
Figure 10 : circuit magnétique comportant un aimant
Le théorème d’ampère donne : Par ailleurs, on a toujours :
B.Sa = Be.Se et Be = o.He
On obtient à partir de ces trois relations :
• si < 0 : la bobine a une action démagnétisante
• si > 0 : la bobine a une action magnétisante
i
N
e
H
l
H e
a .
.
.
Figure 9: détermination du point de fonctionnement
o
a
e
a
a
B
l
e
S
S
l
H
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
18.
1.9 Conversion électromécanique
1.9.1Etude générale (énergie et coénergie)
De manière générale un convertisseur électromécanique est un dispositif destiné à transformer l’énergie
électrique en énergie mécanique par l’intermédiaire d’un champ magnétique. Il es formé d’un circuit
magnétique comportant une parie fixe et une partie mobile, sur lesquelles son placés un ou plusieurs
enroulement et éventuellement des aimants. On peu établir les équations du système en étudiant les variations
de l’énergie magnétique emmagasiné, ou celles de la coénergie.
On procède à un bilan énergétique. Considérons pour commencer un dispositif à simple excitation, figure 11.
Figure 11 : convertisseur électromécanique à simple excitation
La variation élémentaire d’énergie magnétique : dW = We - Wj - Wm
Avec :
We = u.i dt : énergie électrique fournie par la source
Wj = R.i2 dt : énergie perdue par effet joule
Wm = m d : énergie mécanique
On peut ainsi écrire : dW = u.i dt - R.i2 dt - m d
dt
i
R
d
i
dt
i
u
i
R
dt
d
u 2
.
.
.
.
.
Ce qui donne : dW = i.d - m d
On peut également exprimer la différentielle de la coénergie W’, sachant
que :
dW + dW’ = d (.i) = .di + i.d
Ce qui conduit à : dW’ = i.d + m d
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
19.
La formule segénéralise facilement pour un système à excitation multiple. Avec M bobines, on obtient pour
les variations élémentaires des énergies :
M
j
j
j
e dt
i
u
W
1
M
j
j
j
j dt
i
R
W
1
2
d
W m
m
Ce qui donne pour la différentielle de l’énergie magnétique :
M
j
m
j
j d
d
i
dW
1
De même pour la coénergie :
M
j
m
j
j d
d
i
dW
1
'
Pour déterminer les expressions de l’énergie et de la coénergie, on imagine qu’on bloque la partie mobile.
Les différentielles s’écrivent alors en revenant au système à simple excitation :
dW = i.d
dW’ = i.d
On obtient W et W’ par intégration :
d
i
W .
i
di
W .
'
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
20.
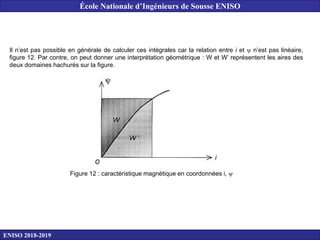
Il n’est paspossible en générale de calculer ces intégrales car la relation entre i et n’est pas linéaire,
figure 12. Par contre, on peut donner une interprétation géométrique : W et W’ représentent les aires des
deux domaines hachurés sur la figure.
Figure 12 : caractéristique magnétique en coordonnées i,
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
21.
1.9.2 Expressions ducouple
L’énergie W emmagasinée dans le circuit magnétique est fonction de deux variables et . Sa
différentielle peut donc s’écrire à l’aide des dérivées partielles :
d
d
i
d
W
d
W
dW m.
.
Ce qui donne :
W
i
W
m
On obtient une autre formulation du couple en utilisant la coénergie W’. Celle-ci est fonction de deux
variables i et . Sa différentielle s’écrit :
d
di
d
W
di
i
W
dW m.
.
'
'
'
Ce qui donne :
i
W
'
'
W
m
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
22.
Cette dernière expressiondu couple est la plus commode à mettre en œuvre.
Pour un dispositif à mouvement linéaire on obtient :
i
W
'
X
W
F
'
1.9.4 Expressions simplifiées (circuits linéaires)
Fort heureusement, on peut très souvent considérer que les carcasses magnétiques des
transducteurs ou des machines tournantes ne sont pas saturées, et qu’on a affaire à des circuits
linéaires. Dans ces conditions la courbe de magnétisation en fonction de i se réduit à une droite,
figure 13 et le flux est directement proportionnel au courant i. seul le facteur de proportionnalité
(inductance ou réluctance sont en fonction des grandeurs géométrique de dispositif). L’énergie et la
coénergie sont alors égales
Figure 13 : caractéristique magnétique en coordonnées i, (circuit linéaire)
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
23.
- l’énergie magnétiques’écrit : 2
.
2
1
m
R
W
• Rm : réluctance magnétique
• : flux magnétique
Dispositif à mouvement circulaire :
m
m
R
2
2
1
Dispositif à mouvement linéaire:
X
R
F m
2
2
1
- la coénergie s’écrit :
• L : inductance du circuit
2
.
2
1
i
L
W
L
i
m
2
2
1
Dispositif à mouvement circulaire :
Dispositif à mouvement linéaire:
X
L
i
F
2
2
1
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
24.
Exemple 2
Le systèmedéfini par la figure 13 permet d’exercer simultanément une force d’attraction verticale et une
force de centrage latérale. Un tel système est envisagé pour la sustentation magnétique et le guidage de
certains trains à très grande vitesse.
L’étude des forces s’exerçant sur un tel système implique la connaissance de la distribution des lignes de
champs dans l’entrefer. Devant la difficulté de la détermination exacte de celles-ci, on recourt
fréquemment à des hypothèses simplificatrices.
Hypothèse :
les lignes de champ n’apparaissent que dans la zone d’entrefer minimum et sont dirigées selon x
la perméabilité du fer est infinie
Figure 13 : système de sustentation magnétique
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
25.
Exemple 3 :
Toutecircuit ferromagnétique excité par un courant, et dont une partie est mobile, peut
constitué une machine. Si la partie mobile se déplace en rotation, la machine est un
convertisseur rotatif. La machine tournante la plus élémentaire est représentée sur la figure
14.
Trouver l’expression du couple électromagnétique, sachant que : L =Lo-L1cos (2).
Figure 14
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
26.
1.10 Cas particulierdes circuits magnétiques
1.10.1Circuit magnétique à excitation simple
On considère le dispositif à excitation simple. L’enroulement de N spires parcouru
par un courant i crée un flux . Si le fonctionnement est linéaire, on peut définir la
réluctance Rm du circuit magnétique et tracer le schéma électrique analogue
figure 15.
Rm
Figure 15 : modèle analogue du circuit magnétique à excitation simple
= N.i= Rm.
m
R
i
N.
On en déduit le flux total dans la bobine : i
L
i
R
N
m
.
2
m
R
N
L
2
On a ainsi :
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
27.
1.10.2 Circuit magnétiqueà excitation double
On considère maintenant deux enroulements bobinés sur le même circuit magnétique, figure 16. On n’a
pas représenté ici de partie mobile car cela ne change rien aux expressions des inductances.
Figure 16 : Circuit magnétique à excitation double
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
28.
Si le fonctionnementest linéaire, on peut calculer les flux par principe de superposition.
lorsque la bobine 1 est seul alimentée :
flux à travers une spire de l’enroulement 1 :
flux à travers une spire de la bobine 2 :
o
o
R
R
R
R
R
i
N
2
2
1
1
1
11
.
.
11
2
0
21
R
R
Ro
lorsque la bobine 2 est seul alimentée :
flux à travers une spire de l’enroulement 2 :
flux à travers une spire de la bobine 1:
1
1
2
2
2
22
.
.
R
R
R
R
R
i
N
o
o
22
1
0
12
R
R
Ro
Lorsque les deux bobines sont parcourues par des courant simultanément, on a :
1
1
2
2
2
1
0
2
2
1
1
1
1
.
.
.
.
R
R
R
R
R
i
N
R
R
R
R
R
R
R
R
i
N
o
o
o
o
o
o
o
o
o
o
R
R
R
R
R
i
N
R
R
R
R
R
R
R
R
i
N
2
2
1
1
1
2
0
1
1
2
2
2
2
.
.
.
.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
29.
Les flux totauxdans les deux enroulements peuvent s’écrire :
1 = N1.1 = L1.i1 + M. i2
2 = N2.2 = L2.i2 + M. i1
Avec :
o
o
R
R
R
R
R
N
L
2
2
1
2
1
1
.
1
1
2
2
2
2
.
R
R
R
R
R
N
L
o
o
2
1
2
1
2
1
.
. R
R
R
R
R
R
R
N
N
M
o
o
o
Le coefficient M est appelé inductance mutuelle entre les deux bobines
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
30.
1.10.3 Circuit magnétiqueà excitation multiple
De façon générale, si le circuit magnétique comporte M bobines, on peut écrire le flux totale dans
l’enroulement numéro j sous la forme :
M
k
k
jk
k
j
j i
N
N
1
Les coefficients sont les perméances mutuelles entre les enroulements j et k lorsque j et k sont
différents tandis que les coefficients sont les perméances propres de chaque bobine. Ont peut alors
définir des inductances en écrivant :
jk
jj
M
k
k
jk
j i
L
1
Les inductances Ljk sont des inductances mutuelles lorsque j est différent de k. on note Ljk = Lkj.
Les inductances Ljj sont des inductances propres.
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
31.
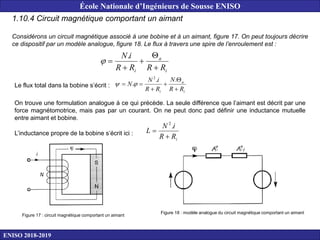
1.10.4 Circuit magnétiquecomportant un aimant
Considérons un circuit magnétique associé à une bobine et à un aimant, figure 17. On peut toujours décrire
ce dispositif par un modèle analogue, figure 18. Le flux à travers une spire de l’enroulement est :
i
a
i R
R
R
R
i
N
.
Le flux total dans la bobine s’écrit :
i
a
i R
R
N
R
R
i
N
N
.
.
.
2
On trouve une formulation analogue à ce qui précède. La seule différence que l’aimant est décrit par une
force magnétomotrice, mais pas par un courant. On ne peut donc pad définir une inductance mutuelle
entre aimant et bobine.
L’inductance propre de la bobine s’écrit ici :
i
R
R
i
N
L
.
2
Figure 17 : circuit magnétique comportant un aimant
Figure 18 : modèle analogue du circuit magnétique comportant un aimant
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO
32.
1.10.5 Expressions del’énergie et de la coénergie
Dans le cas d’un système linéaire, la caractéristique magnétique, considérée en coordonnées i, pour un
système à simple excitation, est une droite, figure 13.
On constate que W = W’ car ces deux grandeurs sont représentées par deux aires identiques sur la figure.
On peut alors calculer l’intégrale :
L
d
L
d
i
W
2
0
0
2
1
.
.
D’autres formulations sont possibles : 2
2
2
1
.
2
1
'
R
i
L
W
W
ENISO 2018-2019
École Nationale d’Ingénieurs de Sousse ENISO









































![[C elm][co]conversion electromecanique](https://cdn.slidesharecdn.com/ss_thumbnails/celmcoconversionelectromecanique-200227124318-thumbnail.jpg?width=640&height=640&fit=bounds)




