Téléchargé 68 fois
![12Android pour l’industrie
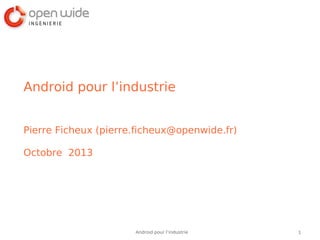
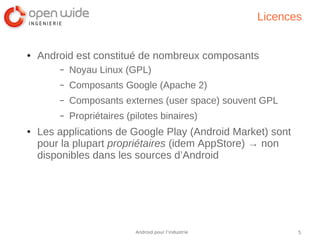
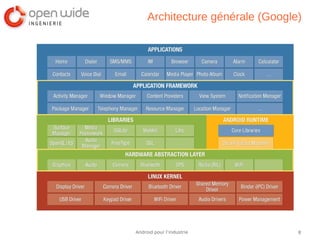
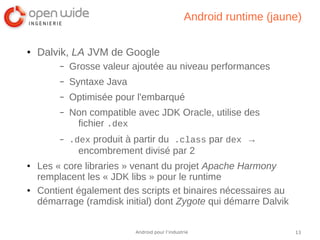
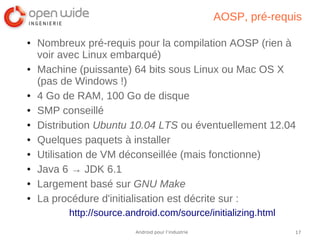
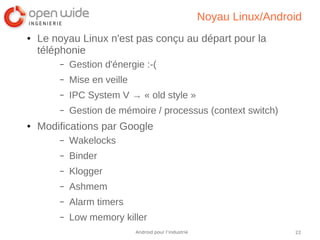
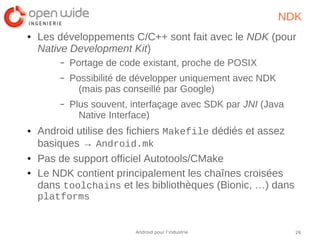
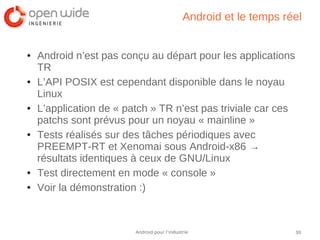
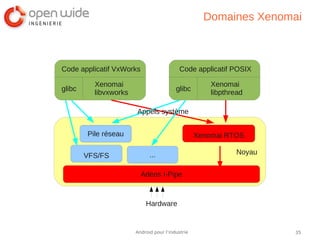
Architecture HAL
/frameworks/base/services/java/
/frameworks/base/services/jni/
/hardware/libhardware/
/device/[MANUF.]/[DEVICE]
/sdk/emulator/
Noyau ou module
/frameworks/base/core/
AOSP-provided
ASL
Manuf.-provided
Manuf. license
Manuf.-provided
GPL-license
Schéma K. Yaghmour
Répertoires AOSP](https://image.slidesharecdn.com/androidindustrieltlse-131009035231-phpapp02/85/Android-pour-l-industrie-12-320.jpg)
![18Android pour l’industrie
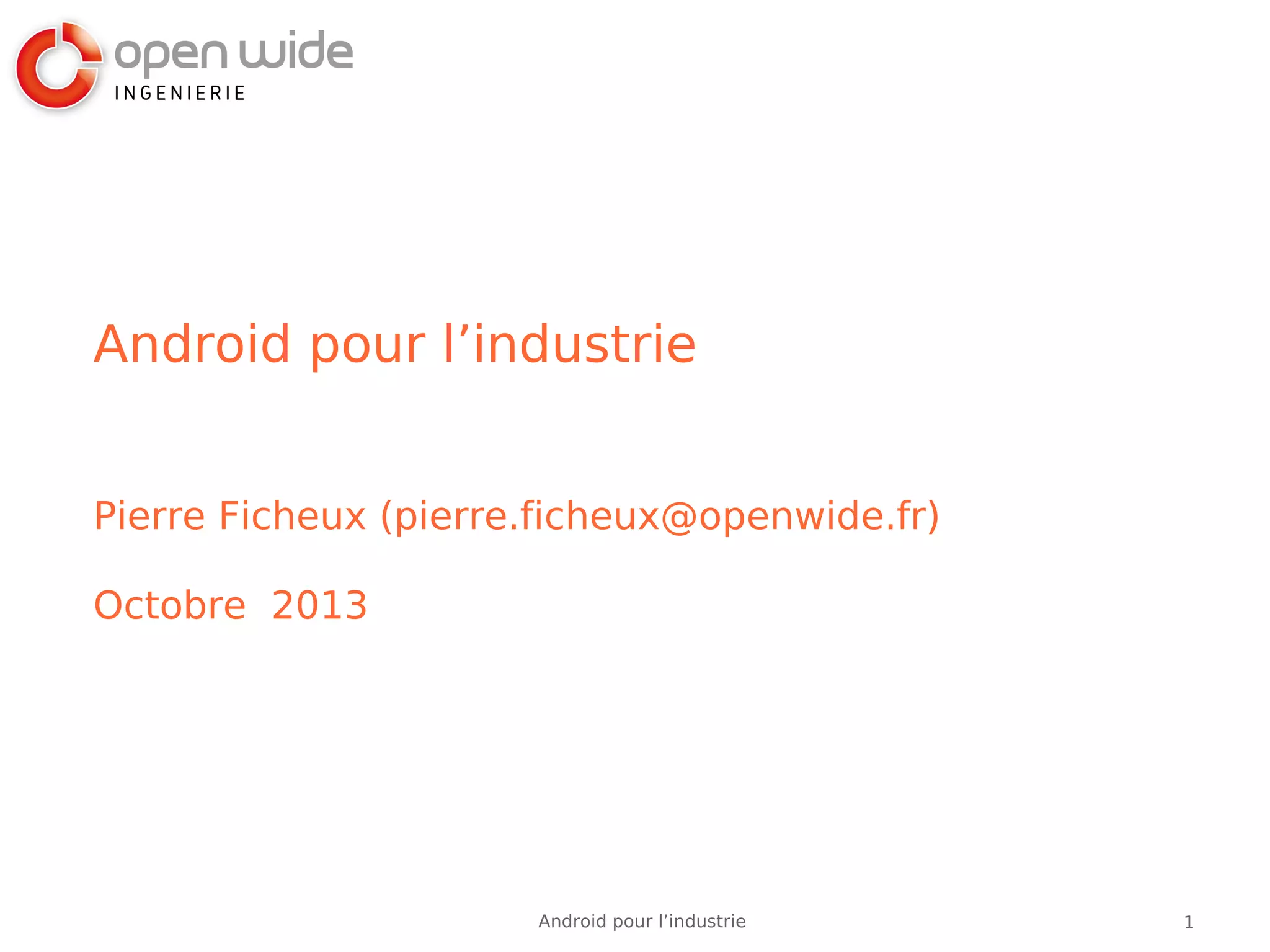
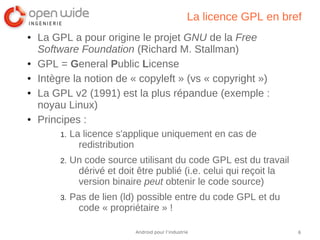
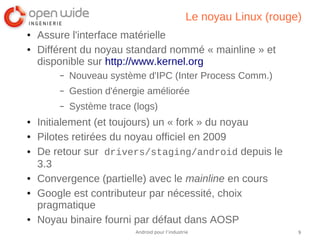
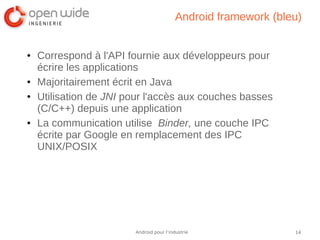
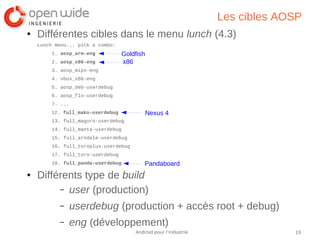
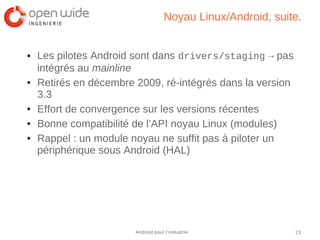
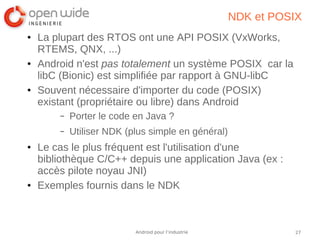
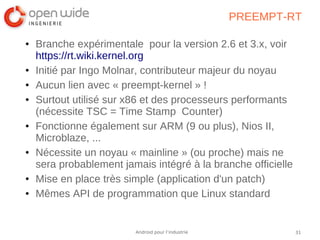
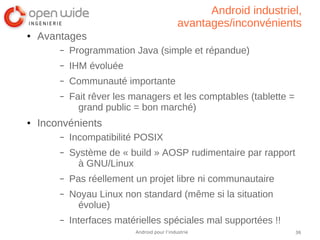
AOSP « in a nutshell »
● Google fournit l'outil repo (un script Python) afin de
gérer les nombreux dépôts Git
● Cet outil utilise un fichier manifest pour indexer les
dépôts
$ mkdir work && cd work
$ repo init -u https://android.googlesource.com/platform/manifest
[-b <branch>]
$ repo sync [-j N]
● Sélection de la cible, compilation et test
$ source build/envsetup.sh
$ lunch aosp_arm-eng
$ make -j N
$ emulator [-show-kernel -shell] &
synchronisation avec le dépôt, N jobs
chargement des variables
cible émulateur (goldfish) + mise au point (eng)
sélection de la branche, exemple android-4.3_r2](https://image.slidesharecdn.com/androidindustrieltlse-131009035231-phpapp02/85/Android-pour-l-industrie-18-320.jpg)
![32Android pour l’industrie
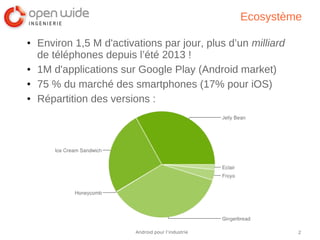
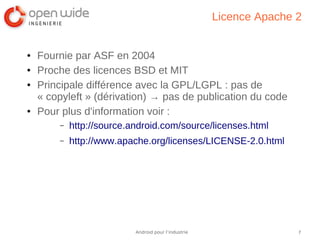
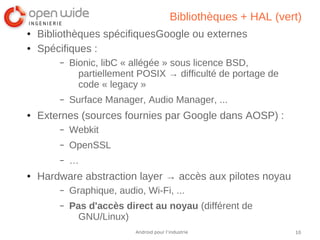
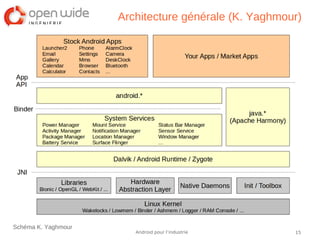
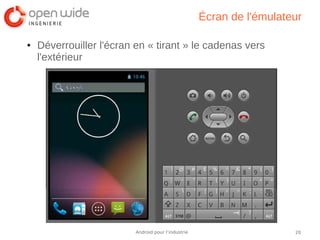
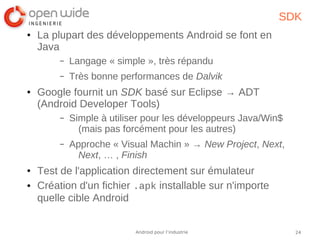
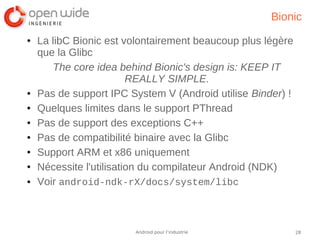
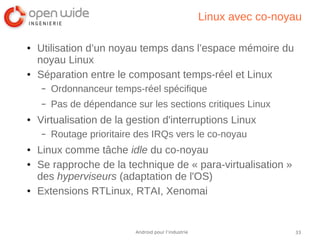
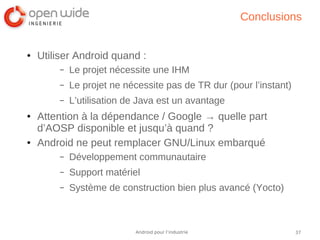
PREEMPT-RT, suite
● Threaded interrupt model → utilisation d'un thread
noyau (donc interruptible) pour le traitement de chaque
interruption
4 2 root SW< 0 0% 0% [sirq-high/0]
5 2 root SW< 0 0% 0% [sirq-timer/0]
...
6 2 root SW< 0 0% 0% [sirq-net-tx/0]
● Prévention des inversions de priorité (par héritage)
● Timers noyau haute précision (API hrtimer)
● Réécriture complète des mécanismes de
synchronisation (spinlock → mutex)
● Le résultat est un noyau (presque) « préemptif », mais
reste un noyau Linux
● Sections critiques avec des tâches non TR](https://image.slidesharecdn.com/androidindustrieltlse-131009035231-phpapp02/85/Android-pour-l-industrie-32-320.jpg)

Le document traite de l'utilisation d'Android dans l'industrie, soulignant ses caractéristiques, ses limites et les défis liés à son adaptation pour des projets industriels. Il évoque notamment les problèmes de compatibilité POSIX, le besoin d'adaptation des versions, et la complexité du développement sous Linux embarqué, tout en soulignant que les projets Android ne peuvent pas remplacer GNU/Linux. Enfin, il met en avant les avantages d'Android, comme la simplicité de la programmation en Java, tout en mettant en garde contre la dépendance à Google et le manque de véritable nature communautaire du projet.
























































