Téléchargé 26 fois
![R´egression Lin´eaire Simple
Probl`eme math´ematique
argmin
f∈G
=
n
i=1
l(yi − f(xi)) (1)
o`u :
— l(.) une fonction de coˆut et G un ensemble de
fonctions donn´ees. Pratiquement, on utilise la fonction
de coˆut quadratique l(u) = u2.
— Dans le cas de la mod´elisation par une droite
(r´egression lin´eaire simple) nous prenons la classe de
fonctions : G = {f : f(x) = ax + b, (a, b) ∈ R2}
Mod´elisation statistique
Y1, ..., Y1 ´echantillon avec Yi observ´e sous certain condition X.
Le mod`ele :
Y = β0 + β1X + ε
X ∈ R non al´eatoire, par contre Y est al´eatoire et d´epend de
X.
Hypoth`eses du mod`ele
1. E(ε) = 0 c`ad E(Y ) = β0 + β1X.
2. V(ε) = σ2 = cste.
3. ε ∼ N(0, σ2).
4. εi⊥εj (cov(εi, εj = 0).
Estimation des param`etres de mod`ele
Trouver β0 et β1 qui minimisent la quantit´e :
I(β0, β1) =
n
i=1
(yi − β0 − β1xi)2
= Y − β0 − β1X 2
. Les ˆβ0, ˆβ1 sont appel´es des estimateurs ;
Sous H1, H2, H3 et H4, ces estimateurs obtenus par la
m´ethode de maximum de vraissemblance ⇐⇒ `a ceux obtenus
par la m´ethode des moindres carr´es.
Mˆeme si les H3 et H4, ne sont pas v´erifi´ees, la MC consiste `a
trouver β0 et β1 tq S est minimale :
∂I( ˆβ0, ˆβ1)
∂β0
=
∂I( ˆβ0, ˆβ1)
∂β1
= 0
Formules des estimateurs
ˆβ1 = SXY
SXX
, ˆβ0 = ¯Y − ˆβ1
¯X
o`u :
SXY =
1
n − 1
n
i=1
(Xi − ¯X)(Yi − ¯Y )
SXX =
1
n − 1
n
i=1
(Xi − ¯X)2
Propri´et´es de ˆβ0 et ˆβ1
E(ˆβ1) = β1, E(ˆβ0) = β0
V(ˆβ1) = σ2
(n−1)SXX
, V(ˆβ0) = ( 1
n
+ ¯x2
(n−1)SXX
)σ2
Estimation des erreurs (par les r´esidus)
ˆεi = yi − ˆyi, ˆεi = 0 (propri´et´e)
Estimation de σ2
ˆσ2 =
ˆε2
i
n−2
,
n − 2 est le nombre de ddl
E(ˆσ2) = σ(n − 2) ?
Le coefficient de d´etermination R2
Le coefficient de d´etermination R2 est d´efini par :
R2
=
SCE
SCT
=
ˆY − ¯y1
Y − ¯y1
avec :
SCT = SCE + SCR
n
i=1
(yi − ¯y)2
=
n
i=1
(ˆyi − ¯y)2
+
n
i=1
ˆε2
i
Inf´erence statistique
Lois des estimateurs des MC : variance connue
1. ˆβ0 ∼ N(β0, ( 1
n
+ ¯x2
(n−1)SXX
)σ2)
2. ˆβ1 ∼ N(β1, σ2
(n−1)SXX
)
3. ˆβ =
ˆβ0
ˆβ1
∼ N(β =
β0
β1
, σ2V),
avec : V =
1
n
+ ¯x2
(n−1)SXX
−¯x
(n−1)SXX
−¯x
(n−1)SXX
1
(n−1)SXX
4. n−2
σ2 ˆσ2 ∼ χ2
n−2
5. (ˆβ0,ˆβ1) et ˆσ2 sont ind´ependants
Les lois des estimateurs des MC : variance
estim´ee
Lorsque σ2 est estim´ee par ˆσ2 nous avons :
1.
ˆβ0−β0
ˆσ2
0
∼ Tn−2, ˆσ0 = ˆσ 1
n
+ ¯x2
(n−1)SXX
2.
ˆβ1−β1
ˆσ2
1
∼ Tn−2, ˆσ1 = ˆσ 1
(n−1)SXX
3. 1
2 ˆσ2
(ˆβ − β) V−1(ˆβ − β) ∼ F2,n−2
Ces propri´et´es nous permettent de donner des intervalles de
confiance (IC) ou des r´egions de confiance (RC) des
param`etres inconnus.
Intervalles ET R´egion de confiance
1. IC(βi) : [ˆβi ± t1− α
2
× ˆσi].
2. Une r´egion de confiance simultan´ee des deux
param`etres inconnus βi est donn´ee par l’´equation :
1
2 ˆσ2
[n(ˆβ0 − β0)2
+ 2n¯x(ˆβ0 − β0)(ˆβ1 − β1)+
x2
i (ˆβ1 − β1)2
] ≤ f1−α
(2)
o`u : f1−α repr´esente le fractile de niveau (1 − α) d’une
loi de Fisher `a (2, n − 2) ddl.
3. IC(σ2) : [ n−2
c1− α
2
ˆσ2, n−2
c α
2
ˆσ2].
o`u : c1− α
2
(resp. cα
2
) repr´esente le fractile de niveau
(1 − α
2
) (de niveau ( α
2
)) d’une loi du χ2 `a (n − 2) ddl.
4. IC(E(yi) = β0 + β1xi) :
[ ˆyj ± t1− α
2
× ˆσ 1
n
+
(xj −¯x)2
(n−1)SXX
]
5. IC(yn+1 pr´evue) :
[ˆyp
n+1 ± t1− α
2
× ˆσ 1 + 1
n
+
(xj −¯x)2
(n−1)SXX
]
Code R
Pour une r´egresssion, nous commen¸cons toujours par
repr´esenter les donn´ees, pour rep´erer ce que nous semble une
tendance lin´eaire :
plot(X,Y) repr´esenter les donn´ees Y=f(X)
reg < − lm(Y ∼ X, data) effectuer la r´egression lin´eaire
summary(reg) obtenir un r´esum´e des r´esultat de la RL
predict(reg,...) pr´edire avec le mod`ele de RL
confint(parameter) IC de param`etres
df.residual(reg) ddl des r´esidus
coef(reg) capturer les coefficients du mod`ele
residuals(reg) capturer les r´esidus du mod`ele
deviance(reg) capturer l’´ecart du mod`ele
fitted(reg) les valeurs ajust´es par le mod`ele
R´ef´erences
[1] MATZNER-LOBER, ´Eric. R´egression : Th´eorie et
applications. Springer Science and Business Media, 2007.
Mohamed Ali Khouaja, PhD Student in applied mathematics and
financial engineering](https://image.slidesharecdn.com/cheatsheetrgressionavecr-khouaja-160323113535/85/Cheat-sheet-regression-lineaire-simple-Sous-R-1-320.jpg)

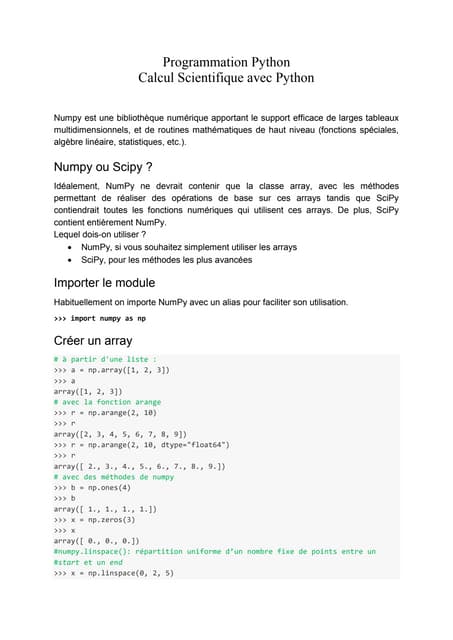
Le document traite de la régression linéaire simple, présentant les concepts de base tels que la fonction de coût, l'estimation des paramètres et les hypothèses du modèle. Il inclut des formules pour les estimateurs et des propriétés statistiques, ainsi que des méthodes pour calculer et interpréter les intervalles de confiance et les régions de confiance. Enfin, il mentionne l'utilisation de R pour effectuer des régressions et analyser les résultats obtenus.