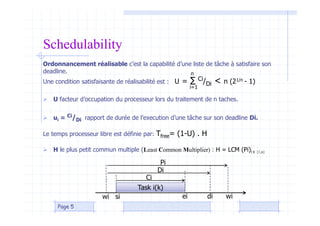
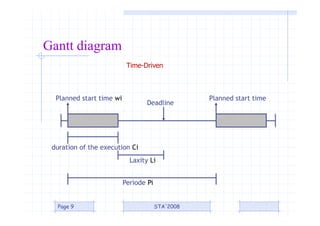
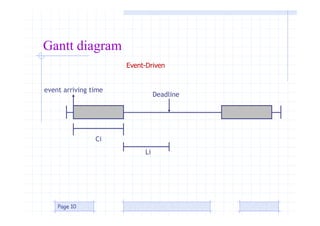
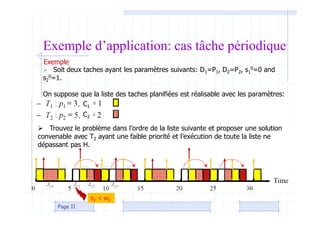
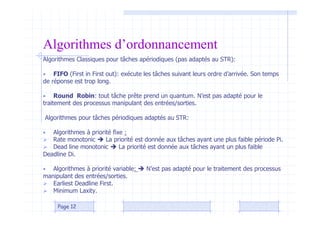
Ce document traite des algorithmes d'ordonnancement des tâches pour processeurs, expliquant les concepts fondamentaux comme le quantum, les délais, et les échelles de temps. Il présente différents types d'ordonnancement tels que FIFO et EDF, ainsi que des modèles de tâches à exécution périodique ou apériodique. Des exemples pratiques et des algorithmes spécifiques de gestion des priorités sous Linux sont également abordés.


















































![cours raspberry [Enregistrement automatique].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/coursraspberryenregistrementautomatique-260206145736-b1015531-thumbnail.jpg?width=640&height=640&fit=bounds)
