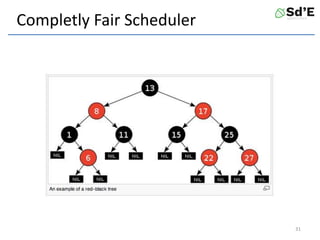
Ce document traite des concepts de systèmes d'exploitation, notamment la planification des processus, la communication inter-processus (IPC), et divers algorithmes de planification tels que le round robin et le shortest process next. Il aborde également des problématiques comme l'inversion de priorité, la famine, et la gestion des signaux, illustrant ces concepts par des exemples de code. Enfin, il mentionne les processus orphelins et zombies ainsi que différentes méthodes d'IPC comme les pipes et les sockets.


















![Pipe Exemple Linux
int p[2];
int rc;
rc = pipe (p);
if (rc < 0)
{
perror ("pipe");
}
else
{
// p[0] <- read from here
// p[1] -> write here
}
46](https://image.slidesharecdn.com/sde26-220411210612/85/SdE2-Planification-IPC-46-320.jpg)
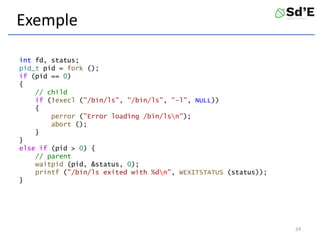
![Pipe Exemple Linux
int p[2];
int rc, pid;
char buffer[BUFFER_SIZE];
rc = pipe (p);
if (rc < 0) {
perror ("pipe");
}
else
{
pid = fork ();
if (pid == 0) {
close (p[1]);
read (p[0], buffer, BUFFER_SIZE);
// ...
}
else
if (pid > 0) {
close (p[0]);
memcpy (buffer, ..., BUFFER_SIZE);
write (p[1], buffer, BUFFER_SIZE);
// ...
}
}
47](https://image.slidesharecdn.com/sde26-220411210612/85/SdE2-Planification-IPC-47-320.jpg)