Le document traite des systèmes d'exploitation, en se concentrant sur la communication inter-processus (IPC) via des mécanismes tels que les signaux, les pipes, la mémoire partagée et les sockets. Il aborde également la planification des processus, en expliquant les différents types de planification (préemptive et non-préemptive), ainsi que des concepts comme le changement de contexte et les types de processus. Enfin, le document évoque le Completely Fair Scheduler et des notions associées à la gestion des priorités et de l'équité dans l'exécution des processus.

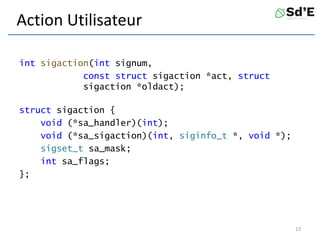
![Pipe Exemple Linux
int p[2];
int rc;
rc = pipe (p);
if (rc < 0)
{
perror ("pipe");
}
else
{
// p[0] <- read from here
// p[1] -> write here
}
19](https://image.slidesharecdn.com/sde5-190319220809/85/SdE-5-Communication-entre-processus-et-Planification-19-320.jpg)
![Pipe Exemple Linux
int p[2];
int rc, pid;
char buffer[BUFFER_SIZE];
rc = pipe (p);
if (rc < 0) {
perror ("pipe");
}
else
{
pid = fork ();
if (pid == 0) {
close (p[1]);
read (p[0], buffer, BUFFER_SIZE);
// ...
}
else
if (pid > 0) {
close (p[0]);
memcpy (buffer, ..., BUFFER_SIZE);
write (p[1], buffer, BUFFER_SIZE);
// ...
}
}
20](https://image.slidesharecdn.com/sde5-190319220809/85/SdE-5-Communication-entre-processus-et-Planification-20-320.jpg)