Téléchargé 55 fois



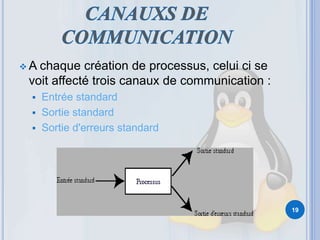

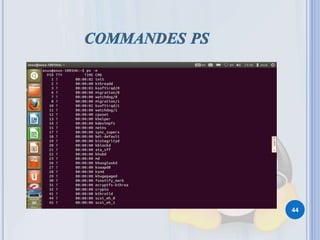
![ Commande ps
permet de voir l'état des processus en cours d'exécution
sur une machine
Syntaxe:
ps [options]
Rarement utilisé sans option
42](https://image.slidesharecdn.com/exposelinuxgestiondesprocessus-161225144103/85/Expose-linux-gestion-des-processus-42-320.jpg)


Le document traite des caractéristiques des processus dans un système d'exploitation, en distinguant les processus système et les processus utilisateurs. Il explore les états des processus, les mécanismes d'ordonnancement, la création et la terminaison des processus, ainsi que la gestion de la communication entre eux à l'aide de signaux. Enfin, il décrit diverses commandes Unix utilisées pour surveiller et gérer les processus en cours d'exécution.










































































