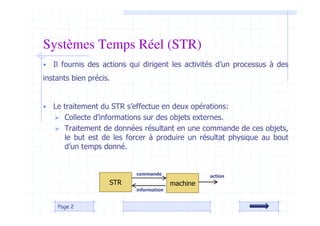
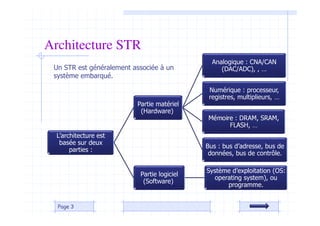
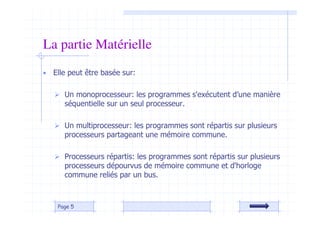
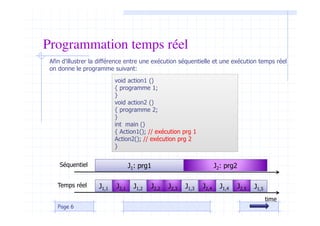
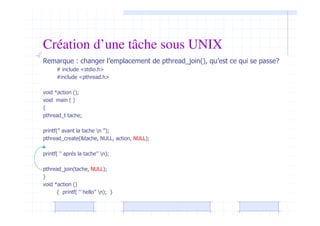
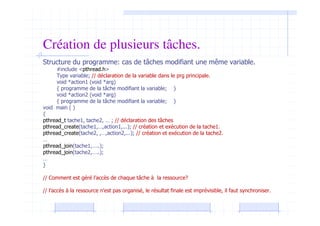
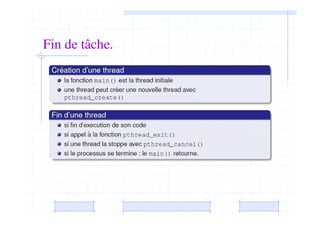
Le document présente les systèmes temps réel (STR), décrivant leur fonctionnement, leur architecture et la gestion des processus et tâches. Il aborde les différences entre les exécutions séquentielles et temps réel, ainsi que la création de tâches sous Unix utilisant des threads POSIX. Des exemples pratiques de code illustrent la création et la gestion des tâches, en mettant en avant l'importance de la synchronisation pour l'accès aux ressources partagées.