Ce document traite de l'ordonnancement dans les systèmes temps réel, en mettant l'accent sur des concepts tels que la prédictibilité temporelle, les types de tâches (périodiques, apériodiques, sporadiques) et les méthodes d'ordonnancement. Il discute des algorithmes d'ordonnancement, y compris le Rate Monotonic Scheduling (RMS) et le Deadline Monotonic Scheduling (DMS), ainsi que des critères d'ordonnançabilité basés sur l'utilisation du processeur et l'analyse du temps de réponse des tâches. Des exemples pratiques et des exercices permettent d'illustrer ces concepts et de vérifier leur application dans des scénarios réels.
![IUT Blagnac Introduction aux systèmes temps réel 33
DMS : généralisation de RMS
[cas où di ≤ pi]
Les tâches avec des échéances (relatives) plus courtes
sont plus prioritaires
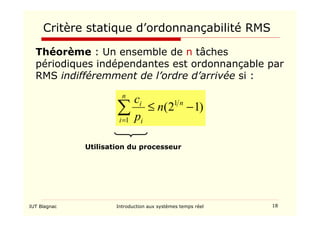
Critère basé sur l’utilisation CPU :
)
1
2
( 1
1
−
≤
∑
=
n
n
i i
i
n
d
c
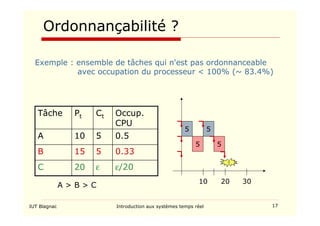
suffisant mais pas nécessaire: il existe des ensembles
ordonnançables avec !!
critère nécessaire et suffisant: analyse du temps de
réponse (la même qu’en RMS)
algorithme optimal en priorités statiques
1
1
∑
=
n
i i
i
d
c](https://image.slidesharecdn.com/str-2-230113123753-1e8b091a/85/STR-2-pdf-33-320.jpg)
![IUT Blagnac Introduction aux systèmes temps réel 38
Critères d’ordonnançabilité EDF
[si di = pi]
Condition nécessaire et suffisante: un ensemble de n
tâches est ordonnanceable par EDF ou LLF si l’utilisation
du processeur est inférieure à 100%
1
1
≤
∑
=
n
i i
i
p
c
difficile de faire mieux ! (sans déborder)
[si di pi]
Condition suffisante mais pas nécessaire:
analyse du temps de réponse plus difficile qu’en RMS
1
1
≤
∑
=
n
i i
i
d
c](https://image.slidesharecdn.com/str-2-230113123753-1e8b091a/85/STR-2-pdf-38-320.jpg)