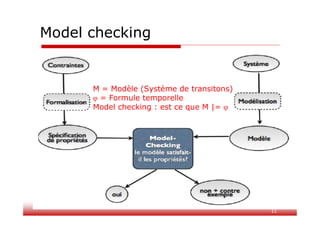
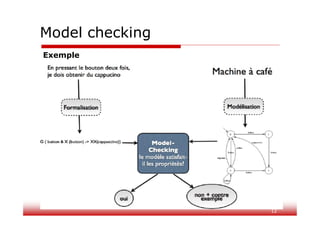
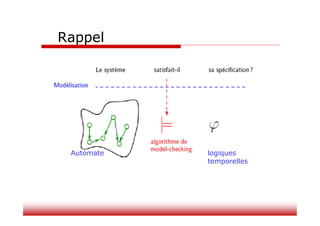
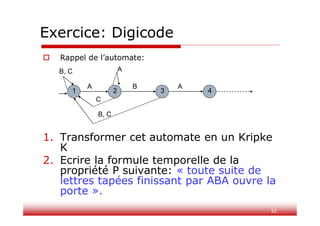
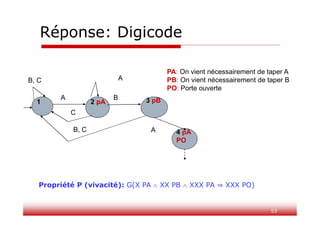
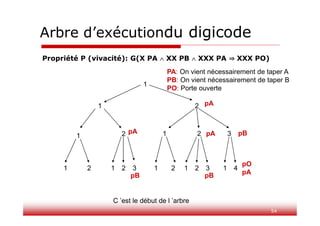
Ce document traite du model checking, une méthode automatique pour vérifier si un automate satisfait une formule temporelle. Il présente la structure de Kripke comme modèle formel et explore les logiques temporelles, notamment PLTL et CTL, utilisées pour spécifier des propriétés dynamiques des systèmes. Des exemples pratiques et des représentations d'automates sont fournis pour illustrer les concepts abordés.