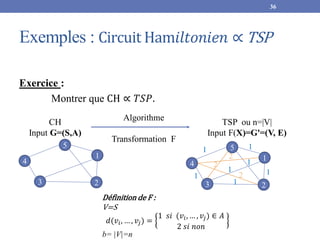
Le document traite de la complexité des problèmes algorithmique à travers des notions clés telles que la décidabilité, les classes P et NP, ainsi que les transformations polynomiales entre différents problèmes. Il détaille également les catégories de complexité en temps, y compris les machines de Turing déterministes et non déterministes, et explique des exemples de problèmes de décision et d'optimisation comme le problème du voyageur de commerce et la satisfiabilité booléenne (SAT). Enfin, le document aborde les notions de NP-complet et NP-dur en présentant des théorèmes et des exemples corollaires.
![Théorème de COOK
Démonstration
1) SAT NP
2) L' NP alors L' α SAT
25
Pour montrer que SAT NP
a- Soit une interprétation I de façon
non déterministe;
b- Vérifier que [𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛
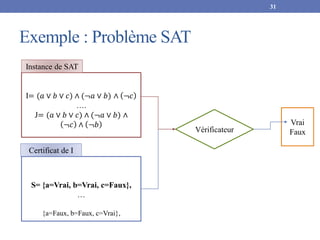
Données de SAT
𝑃 = 𝑝𝑖; 1 ≤ 𝑖 ≤ 𝑛
𝐹 =∧𝑖=1
𝑛
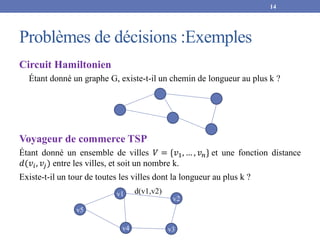
𝐴𝑖
𝐴𝑖 =∨𝑗=1
𝑘𝑖
𝐿𝑖𝑗
[𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛
Algorithme ND
𝐼 = 𝑛
𝑜𝑛 𝑎 𝑚 𝑐𝑙𝑎𝑢𝑠𝑒𝑠
𝑝𝑜𝑢𝑟 𝑢𝑛𝑒 𝑐𝑙𝑎𝑢𝑠𝑒 𝐴𝑖
𝑘 = max
1≤𝑖≤2𝑛
𝑘𝑖; le nombre littéraux
p=max(n, m, k) 𝑂(𝑝3)
Polynomial : SAT NP](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-25-320.jpg)
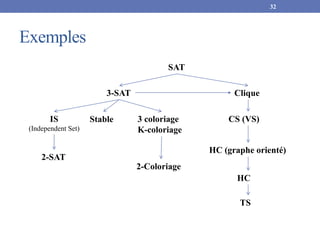
![3-SAT : Description d’un problème
Nature de la formule
• Soit F est conjonction : 𝐹 = 𝐶1 ∧ 𝐶2 ∧ ⋯ ∧ 𝐶𝑘 une formule en 3-CNF, avec k
clauses, contenant chacune 3 littéraux distincts.
• Pour chaque clause on crée 3 sommets, un pour chaque littéral dans la clause.
Données :
𝑃 = 𝑝𝑖; 1 ≤ 𝑖 ≤ 𝑛
𝐹 =∧𝑖=1
𝑛
𝐴𝑖 𝑜𝑢 𝐹 = {𝐴𝑖; 1 ≤ 𝑖 ≤ 𝑛} avec 𝐴𝑖 =∨𝑗=1
3
𝐿𝑖𝑗.
(𝐴𝑖 𝑙′
𝑒𝑛𝑠𝑒𝑚𝑏𝑙𝑒 𝑑𝑒 𝑐𝑙𝑎𝑢𝑠𝑒𝑠 𝑒𝑡 3 𝑙𝑖𝑡𝑡é𝑟𝑎𝑢𝑥 𝑝𝑎𝑟 𝑐𝑙𝑎𝑢𝑠𝑒)
Problème :
Existe-t-il une interprétation I / [𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛 ?
33](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-33-320.jpg)
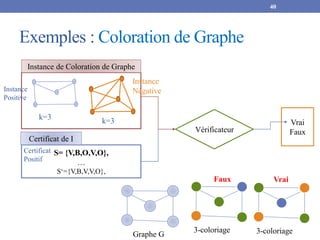
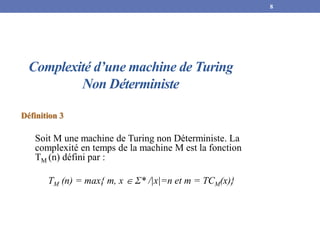
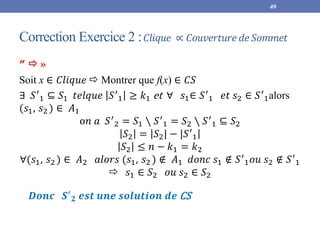
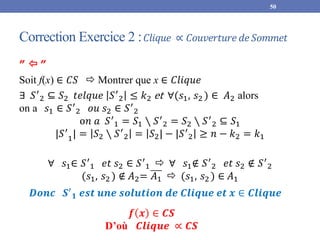
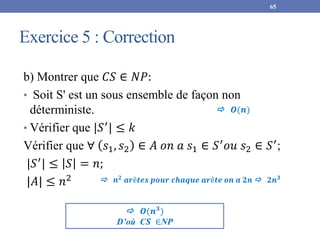
![Correction Exercice 2 :𝐶𝑙𝑖𝑞𝑢𝑒 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒𝑆𝑜𝑚𝑚𝑒𝑡
47
Montrer que f est calculable en un temps polynomial :
Algorithme:
Pour i de 1 à n faire
𝑆2[𝑖] = 𝑆1[𝑖]
Fin pour
Pour i de 1 à n faire
Pour j de 1 à n faire
Si 𝑠𝑖, 𝑠𝑗 ∉ 𝐴1𝑒𝑡 (𝑖 ≠ 𝑗) alors
𝐴2 = 𝐴2 ∪ (𝑠𝑖, 𝑠𝑗)
Fin Si
Fin pour
Fin pour
𝑘2 = 𝑛 − 𝑘1
Pour i de 1 à n faire
Si (𝑠𝑖∉ 𝑆′1) alors
𝑆′2 = 𝑆′2 ∪ {𝑠𝑖}
Fin Si
Fin Pour
O(n)
O(n2)
La transformation est de O(n2)
Transformation polynomiale
f est calculable en un temps
polynomial et borné par O(n2).
O(1)
O(n)
𝐴2 = 𝐴1 = { 𝑠1, 𝑠2 ∉ 𝐴1}
𝑆2 = 𝑆1
𝑘2 = |𝑆1| − 𝑘1 = 𝑛 − 𝑘1
𝑆′2 = 𝑆1𝑆′1
Calcule de
la solution](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-47-320.jpg)
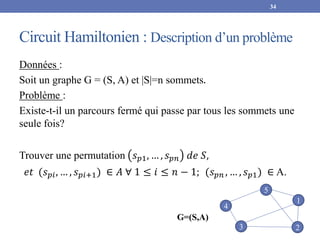
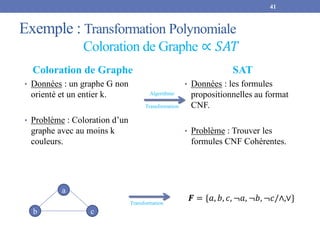
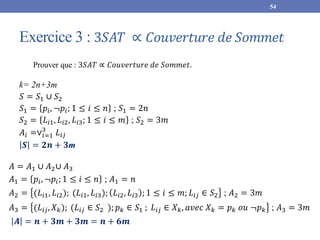
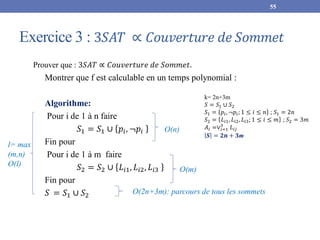
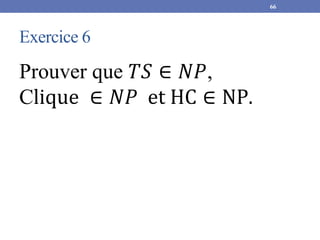
![Exercice 3 : 3𝑆𝐴𝑇 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒 𝑆𝑜𝑚𝑚𝑒𝑡
Indication :
1. Toute variable propositionnelle on lui associe 2 sommets (variable et sa
négation) Exemple : p → 𝑝 𝑒𝑡 ¬𝑝;
2. Toute clause est représentée par un triangle étiqueté par 3 littéraux de clauses;
3. Une arête est couverte par 1 sommet et un triangle est couvert par 2 sommets.
52
Prouver que : 3𝑆𝐴𝑇 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒 𝑆𝑜𝑚𝑚𝑒𝑡.
3-SAT
Données :
𝑃 = 𝑝𝑖; 1 ≤ 𝑖 ≤ 𝑛
𝐹 =∧𝑖=1
𝑚
𝐴𝑖
𝐴𝑖 =∨𝑗=1
3
𝐿𝑖𝑗
Problème :
Existe-t-il une interprétation I /
[𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛 ?
𝑪𝒐𝒖𝒗𝒆𝒓𝒕𝒖𝒓𝒆 𝒅𝒆 𝑺𝒐𝒎𝒎𝒆𝒕
Données :
𝐺: 𝑆, 𝐴
Problème :
Existe-t-il une couverture par
sommets de G de taille k?
∃ 𝑆′
⊆ 𝑆 𝑡𝑒𝑙𝑞𝑢𝑒 |𝑆′
| ≤ 𝑘 et
∀ (𝑠1, 𝑠2 ) ∈ A
on a 𝑠1 ∈ 𝑆′
𝑜𝑢 𝑠2 ∈ 𝑆′
Transformation
F(x)](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-52-320.jpg)
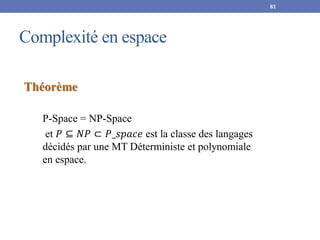
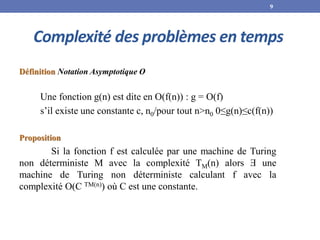
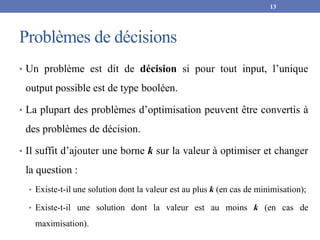
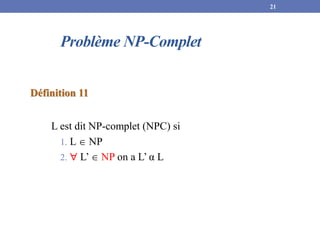
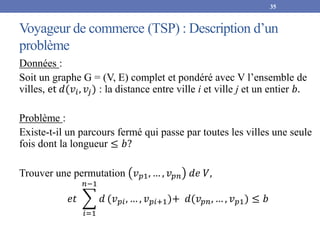
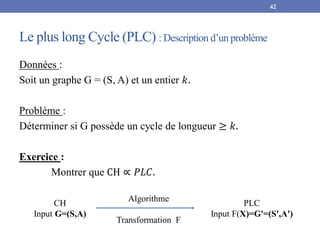
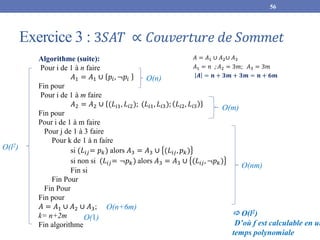
![Exercice 3 : 3𝑆𝐴𝑇 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒 𝑆𝑜𝑚𝑚𝑒𝑡
𝑩 = (𝑝1 ∨ 𝑝2 ∨ 𝑝3) ∧ (𝑝1 ∨ ¬𝑝2 ∨ 𝑝4) ∧ 𝑝2 ∨ ¬𝑝3 ∨ ¬𝑝4
53
l’algorithme de transformation est polynomiale ≅ O(n2)
car on a la taille de graphe est 2n+3m d’où pour parcourir les sommets
on a [2n+3m]2 ≅O(n2).
𝑝1 ¬𝑝1 𝑝2 ¬𝑝2 𝑝3 ¬𝑝3 𝑝4 ¬𝑝4
𝑙1
1
𝑙2
1
𝑙3
1
𝑙1
2 𝑙2
2
𝑙3
2
𝑙1
3
𝑙2
3
𝑙3
3
n variables et
m clauses
la taille de
graphe est
2n+3m
La taille de CS :
k=2m+n (nombre de sommets couverts)
n : pour la couverture de tout les sommets 𝑝𝑖 𝑜ù 𝑝𝑖 𝐼 =V,
2m : pour couvrir les arêtes de chaque triangle.
𝑝1 ¬𝑝1 𝑝2 ¬𝑝2 𝑝3 ¬𝑝3 𝑝4 ¬𝑝4
𝑉 𝐹
𝑉 𝑉
𝑝1 𝐼 = 𝑝2 𝐼 = 𝑝4 𝐼 = 𝑉
𝑒𝑡 𝑝3 𝐼 = 𝐹](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-53-320.jpg)
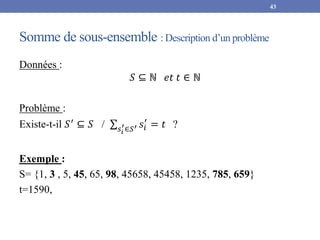
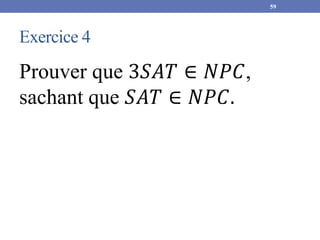
![Exercice 3 : 3𝑆𝐴𝑇 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒 𝑆𝑜𝑚𝑚𝑒𝑡
• x ∈ 3𝑆𝐴𝑇 Montrer que f(x) ∈ 𝐶𝑆
∃ ? 𝑆′
⊂ 𝑆 𝑡𝑒𝑙𝑞𝑢𝑒 𝑆′
𝑒𝑠𝑡 𝑢𝑛𝑒 𝑐𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒
∃ ? I / [𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑚
∃ ? 𝑗0 / [𝐴𝑖𝑗0]𝐼=V
𝑝𝑖 ∈ 𝑃 ; 𝑠𝑖 𝑝𝑖 = 𝑉 𝑝𝑖 ∈ 𝑆′
𝑠𝑖 𝑝𝑖 = 𝐹 ¬𝑝𝑖∈ 𝑆′
∀ 𝑖 𝐿𝑖𝑗1, 𝐿𝑖𝑗2 ∈ 𝑆′
tel que 𝑗1 𝑒𝑡𝑗2 ≠ 𝑗0
|𝑆′
| = 𝑛 + 2𝑚 = 𝑘 𝑜𝑢 ≤ 𝑘
57
1
2
𝑺′
𝒆𝒔𝒕 𝒖𝒏𝒆 𝒔𝒐𝒍𝒖𝒕𝒊𝒐𝒏 𝒅𝒆 𝑪𝑺](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-57-320.jpg)
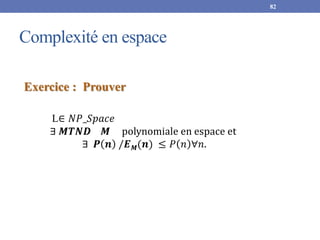
![Exercice 3 : 3𝑆𝐴𝑇 ∝ 𝐶𝑜𝑢𝑣𝑒𝑟𝑡𝑢𝑟𝑒 𝑑𝑒 𝑆𝑜𝑚𝑚𝑒𝑡
Prouvons : ∀ 𝑠1, 𝑠2 ∈ 𝐴 𝑎𝑙𝑜𝑟𝑠 𝑠1 ∈ 𝑆′ 𝑜𝑢 𝑠2 ∈ 𝑆′
𝑠1, 𝑠2 ∈ 𝐴1 ∃ I / 𝑠1, 𝑠2 = 𝑝𝑖, ¬𝑝𝑖
𝑝𝑖 ∈ 𝑆′
ou ¬𝑝𝑖∈ 𝑆′
𝐴1 est couvert
𝑠1, 𝑠2 ∈ 𝐴2 : 𝑠1, 𝑠2 = (𝐿𝑖1, 𝐿𝑖2) ou (𝐿𝑖1, 𝐿𝑖3) ou (𝐿𝑖2, 𝐿𝑖3)
𝐿𝑖𝑗1, 𝐿𝑖𝑗2 ∈ 𝑆′
O𝑛 𝑎 𝑠1 ∈ 𝑆′
ou 𝑠2 ∈ 𝑆′
𝐴𝟐 est couvert
𝑠1, 𝑠2 = (𝐿𝑖𝑗1, 𝑥𝑘) ou (𝐿𝑖𝑗2, 𝑥𝑘) ou (𝐿𝑖𝑗3, 𝑥𝑘)
[𝐿𝑖𝑗0]𝐼=V 𝑥𝑘 𝐼= V
𝐴𝟑 est couvert
58
D’après 1 :
𝑫′
𝒐ù 𝑨 est couvert
𝑺′
𝒆𝒔𝒕 𝒖𝒏𝒆 𝒔𝒐𝒍𝒖𝒕𝒊𝒐𝒏 𝒅𝒆 𝑪𝑺
D’après 2 :
D’après 2 : car
𝐿𝑖𝑗1 ∈ 𝑆′ et 𝐿𝑖𝑗2 ∈ 𝑆′
D’après 1 et 2 : 𝑥𝑘 ∈ 𝑆′](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-58-320.jpg)
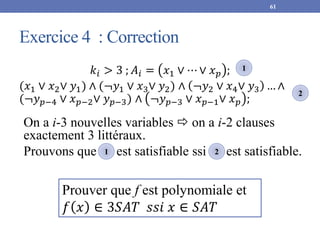
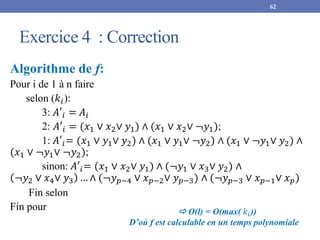
![Exercice 4 : Correction
Prouver que ∶
3𝑆𝐴𝑇 ∈ 𝑁𝑃𝐶, sachant que 𝑆𝐴𝑇 ∈ 𝑁𝑃𝐶.
60
1) 3SAT est un cas particulier de SAT ∈ 𝑁𝑃 (avec k=3) donc 3SAT ∈ 𝑁𝑃.
2)
SAT
Données :
𝑃 = 𝑝𝑖; 1 ≤ 𝑖 ≤ 𝑚
𝐹 =∧𝑖=1
𝑛
𝐴𝑖
𝐴𝑖 =∨𝑗=1
𝑘𝑖
𝐿𝑖𝑗
Problème :
Existe-t-il une interprétation I /
[𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛 ?
3 SAT
Données :
𝑃′ = 𝑝′𝑖; 1 ≤ 𝑖 ≤ 𝑚′
𝐹′ =∧𝑖=1
𝑛′
𝐴′𝑖
𝐴′𝑖 =∨𝑗=1
3
𝐿′𝑖𝑗
Problème :
Existe-t-il une interprétation I' /
[𝐴′𝑖]𝐼′=V ∀ 1 ≤ 𝑖 ≤ 𝑛' ?
𝑘𝑖 = 3 ; 𝐴′𝑖 = 𝐴𝑖;
𝑘𝑖 = 2 ; 𝐴𝑖 = 𝑥1 ∨ 𝑥2 ; 𝑓(𝐴𝑖) = 𝐴′𝑖 = (𝑥1 ∨ 𝑥2∨ 𝑦1) ∧ (𝑥1 ∨ 𝑥2∨ ¬𝑦1);
𝑘𝑖 = 1 ; 𝐴𝑖 = 𝑥1; 𝑓(𝐴𝑖) = 𝐴′𝑖= (𝑥1 ∨ 𝑥2∨ 𝑦1) ∧ (¬𝑦1 ∨ 𝑥3∨ 𝑦2) ∧
¬𝑦2 ∨ 𝑥4∨ 𝑦3 … ∧ (¬𝑦𝑝−4 ∨ 𝑥𝑝−2∨ 𝑦𝑝−3) ∧ (¬𝑦𝑝−3 ∨ 𝑥𝑝−1∨ 𝑥𝑝);](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-60-320.jpg)
![Exercice 4 : Correction
63
𝐴𝑖 = 𝑥1 ∨ 𝑥2∨ ⋯ ∨ 𝑥𝑝
f(x)∈ 𝟑𝑺𝑨𝑻
x ∈ 𝑺𝑨𝑻
Existe-t-il une interprétation I /
[𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛
[𝑥1 ∨ 𝑥2∨ ⋯ ∨ 𝑥𝑝]𝐼= V
∃ 𝑖 /[𝑥𝑖]𝐼=V
𝐼′
=
𝐼
[𝑦𝑗] =V 𝑝𝑜𝑢𝑟 𝑗 ≤ 𝑖 − 2
[𝑦𝑗] =F 𝑝𝑜𝑢𝑟 𝑗 > 𝑖 − 2
[𝐴′𝑖]𝐼′=V
x ∈ 𝑺𝑨𝑻
Existe-t-il une interprétation I' /
[𝐴′𝑖]𝐼′=V ∀ 1 ≤ 𝑖 ≤ 𝑛′
On suppose que
[𝐴𝑖]𝐼=F ∀ 𝐼 𝑒𝑡 𝑥𝑗 𝐼
=F ∀ 𝑗;
[𝑦𝑘]𝐼′=V ; 1 ≤ 𝑘 ≤ 𝑖 − 3
[¬𝑦𝑙−3 ∨ 𝑥𝑙−1∨ 𝑥𝑙]𝐼′= F
[𝐴′𝑖]𝐼′=F ; Contradiction
𝐷′
𝑜ù 𝑖𝑙 ∃ 𝐼/[𝐴𝑖]𝐼=V
f(x)∈ 𝟑𝑺𝑨𝑻](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-63-320.jpg)
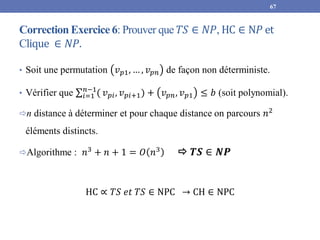
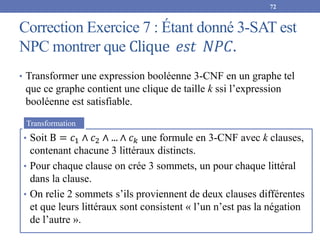
![Correction Exercice 7 : Étant donné 3-SAT est
NPC montrer que Clique 𝑒𝑠𝑡 𝑁𝑃𝐶.
71
Données :
Graphe 𝐺 = (𝑆, 𝐴), |𝑆|=n
et un entier 𝑘 ≤ |𝑆|
Problème :
Pour chaque clause 𝑐𝑖 on a 3
sommets |𝑆|=3m.
A sera construit comme suit : tous les
sommets sont reliés entre eux sauf les
2 sommets de même clause et si l’une
est la négation d’une autre.
𝑪𝒍𝒊𝒒𝒖𝒆
3 SAT
Données :
𝑃 = 𝑝1, 𝑝2, 𝑝3, … , 𝑝𝑛
A= 𝑐1 ∧ 𝑐2 ∧ ⋯ ∧ 𝑐𝑚
𝑐𝑖 = 𝑙𝑖1 ∨ 𝑙𝑖2 ∨ 𝑙𝑖3
Problème :
Existe-t-il une interprétation I
tel que
[𝐴𝑖]𝐼=V ∀ 1 ≤ 𝑖 ≤ 𝑛 ?](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-71-320.jpg)
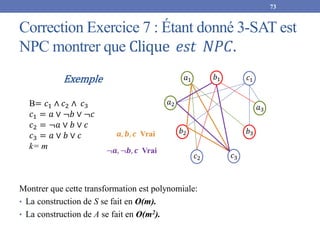
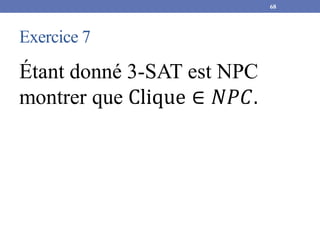
![Correction Exercice 7 : Étantdonné 3-SATest NPC montrerque
Clique 𝑒𝑠𝑡 𝑁𝑃𝐶.
74
” ”
Soit B une instance positive de 3-SAT, c.à.d. B est sous forme
CNF de 3 littéraux par clause et B est Satisfiable.
Montrer que G=f(B) est une instance positive de 𝐶𝑙𝑖𝑞𝑢𝑒.
c.à.d. il contient un sous-graphe complet de m sommets.
Si B est Satisfiable ∃ 𝐼 𝑡𝑒𝑙 𝑞𝑢𝑒[𝑐𝑗]𝐼=V ∀ 1 ≤ 𝑗 ≤ 𝑚
Alors 𝑖𝑙 ∃ 𝑎𝑢 𝑚𝑜𝑖𝑛𝑠 𝑢𝑛 𝑙𝑖𝑡𝑡é𝑟𝑎𝑙 𝑝𝑎𝑟 𝑐𝑙𝑎𝑢𝑠𝑒 𝑙𝑖 𝑡𝑒𝑙 𝑞𝑢𝑒 𝑙𝑖 𝐼=V
𝑆′ = 𝑙1, 𝑙2, 𝑙3, … , 𝑙𝑚 Montrer que 𝑆′
est une clique.
𝑆𝑜𝑖𝑡 𝑙𝑖, 𝑙𝑗 ∈ 𝑆′
𝑒𝑡 𝑙𝑖 ≠ ¬𝑙𝑗 et 𝑖 ≠ 𝑗 (puisqu’ils sont satisfiables
par I et ∉ à la même clause.
(𝑙𝑖, 𝑙𝑗) ∈ 𝐴 d’où S' est une clique de taille ≥ 𝑘 = 𝑚.](https://image.slidesharecdn.com/chapitre2-complexitdesproblmesaveccorrection-221115085502-fe1a02ac/85/Chapitre-2-Complexite-des-problemes-avec-correction-pdf-74-320.jpg)