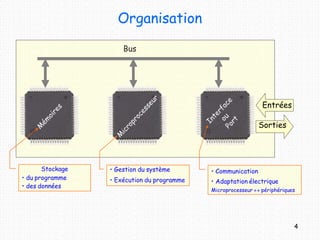
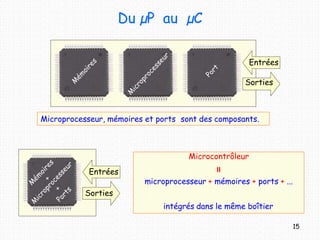
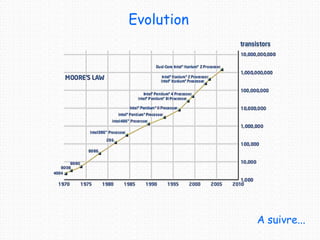
Le document présente l'historique et l'architecture des microprocesseurs, en commençant par l'invention du premier microprocesseur, le 4004, développé par Intel en 1971. Il décrit également le fonctionnement des microprocesseurs, les mémoires associées, ainsi que les interfaces d'entrée/sortie et les bus de communication. Enfin, le texte souligne l'évolution des microprocesseurs et leur intégration avec d'autres composants dans des systèmes comme les microcontrôleurs.