REPUBLIQUE DEMOCRATIQUE DUCONGO
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET
UNIVERSITAIRE
INSTITUT SUPERIEUR DE TECHNIQUES APPLIQUEES
ISTA
GOMBE-MATADI A MBANZA-NGUNGU
DESCIPTEUR DE L’UNITE D’ENSEIGNEMENT (UE)
I. DESCRIPTEUR
I.1. Identification de l’UE
a) Année académique : 2023-2024
b) Unité de rattachement de l’UE : Section Informatique
c) Mention : Informatique
d) Code de l’UE : INF 209
e) Titre de l’UE : Systèmes et réseaux de communication
f) Nombre de crédit : 3
g) Semestre : S6
h) Caractère de l’UE : obligatoire
i) Responsable de l’UE : CT. TSHIMPANGA NTUMBA
j) Eléments constitutifs (EC) de l’UE :
ECA : Réseaux de communication
ECB : Automate Programmable industriel
2.
I.2. ECB
Titre :Automate Programmable Industriel
Enseignant : ASS. MANSINSA MATUETIMONA Bergelin
I.3. Objectifs de l’EC
A l’issue de ce cours, l’étudiant sera capable :
D’avoir une bonne connaissance sur les capteurs, pré actionneurs et
actionneurs ;
De connaitre le mécanisme qui fait marcher une chaîne de production
Industrielle ;
De comprendre l’importance et le fonctionnement d’un Automate
Programmable Industriel ;
D’énumérer les différentes parties d’un Système Automatisé de
Production ;
Savoir programmer un API avec le langage LADDER
I.4. Contenu
Généralité :
Système Automatisé de Production :
Capteurs, pré actionneurs et actionneurs
Automate Programmable Idustriel:
Historique, les bases, la structure interne, le type, ect…
Langage de programmation LADDER
I.5. Compétences professionnelles et disciplinaires visées
CP1 : Communiquer de la manière appropriée à l'écrit et à l'oral
CP3 : Intégrer les TIC dans la réalisation des tâches liées à la profession
d'ingénierie
CP 5 : Concevoir les systèmes technologiques
CP6 : Réaliser les projets
3.
CP7 : Assurerla maintenance des systèmes technologiques
CP8 : Gérer une entreprise ou un projet
1.6. Approches pédagogiques
« Learning by doing » : pratique des logiciels, apprendre à se servir des manuels
de référence, petits projets individuels ou de groupe a réaliser avec les logiciels,
classes inversées
1.7. Modalités d’évaluation
Contrôle continu (exercices de synthèse, de démonstration, de calcul, de
raisonnement, problèmes, exposés individuels ou en équipe).
2. PLAN DETAILLE
a) Crédit : 1 ; Mode d’enseignement : Présentiel
b) Répartition horaire : 16 - 4 – 4
Cours magistral interactif (CMI) : 16 heures
Travaux dirigés (TD) : 4 heures
Travaux pratiques (TP) : 4 heures
TOTAL : 24 heures
C) Objectifs spécifiques de l’UE
Dans le monde industriel en pleine évolution où la compétitivité et la
productivité sont très essentiels, l’automatisation est une nécessité.
Autres fois réservés aux applications spécialisées exigeant des volumes de
traitement importants, les automates programmables industriels sont
maintenant opérationnels dans multiple domaines, de l’aéronautique jusqu’à
l’électroménager. De par la simplicité de leur mise en œuvre et leur
implantation, ils occupent une place importante dans les domaines industriels.
En effet la pertinence d’une automatisation dépend de sa capacité à s’intégrer
dans :
4.
- Un environnementtechnique, elle doit tenir compte des contraintes
d’ordres techniques ;
- Un contexte économique, les étapes improductives de la vie d’un
système automatisé, par exemple la maintenance, doivent être
raccourcies, rendus plus rationnelles et moins couteuses ; Son
exploitation souple et flexible ; Pour contribuer à une réduction des
coûts globaux de production ;
- Un contexte humain, elle doit faciliter la tâche de l’exploitant.
Une automatisation ne peut donc être jugée à la simple évaluation des moyens
techniques mis en œuvre. Il faut nécessairement prendre en compte les
différents aspects sous-tendus par les objectifs en amont, afin de réaliser une
triple intégration économique, technique et humain.
Nous pouvons donc affirmer que cet EC est d’une importance capitale pour nos
étudiants qui rêvent de travailler dans les Systèmes Automatiser de Production
Industriel ; Car à travers le contenu de cet ouvrage, l’étudiant sera déjà
familiarisé aux systèmes industriels.
CHAPITRE I. GENERALITES SUR LES SYSTEMES AUTOMAISES DE
PRODUCTION
I.1. Introduction
I.2. CAPTEUR
I.2.1. Définition
I.2.2. Caractéristique d’un capteur
I.2.3. CAPTEURS LOGIQUES (Tout Ou Rien : TOR)
I.2.3.1- Capteurs avec contact
I.2.3.2. Capteurs sans contact
I.2.3.3. Capteurs Photoélectriques à distance
I.2.4. CAPTEURS NUMERIQUES
I.2.4.1. Codeur optique incrémental
I.2.4.2. Codeur optique absolu
I.2.5. Autres types des capteurs
I.3. PREACTIONNEURS ET ACTIONNEURS
I.3.1. Constitution d’une installation pneumatique
I.3.2. Production de l’énergie pneumatique
I.3.2.1. Compression de l'air
I.3.2.2. Stockage
5.
I.3.3. Distribution
I.3.4. PRINCIPESPHYSIQUES
I.3.5. LES PREACTIONNEURS PNEUMATIQUES
I.3.5.1. Fonction
I.3.5.2. Constituants d’un distributeur
I.3.6. LES ACTIONNEURS PNEUMATIQUES
I.3.6.1. LES VERINS
I.3.6.2. LE GENERATEUR DE VIDE OU VENTURI
I.3.7. LES ACTIONNEURS HYDRAULIQUES
I.3.8. LES PREACTIONNEURS ELECTRIQUES
I.3.8.1.1. Relais électromagnétique
I.3.8.1.2. Relais statique
I.3.8.2. LE CONTACTEUR
I.3.8.3. LE SECTIONNEUR
I.3.9. CONVERTISSEUR ELECTROMECANIQUE
I.3.9.1. Organisation de la machine à courant continu
I.3.9.2. Les moteurs pas à pas
CHAPITRE II. AUTOMATES PROGRAMMABLES INDUSTRIELS
II.1. INTRODUCTION
II.1.1. Définition et Historique des A.P.I :
II.1.2. Domaines d'emploi des automates
II.1.3. Nature des informations traitées par l'automate :
II.2. ARCHITECTURE DES A.P.I
II.2.1. Aspect extérieur
II.2.2. Structure interne
II.3. PRINCIPE DE FONCTIONNEMENT D’UN A.P.I
II.3.1. Le cycle automate
II.3.2. Cycles d’interruption
II.3.3. Les étapes à suivre pour raccorder un automate
II.4. TYPES D’ARCHITECTURES
II.4.1. Architecture centralisée
II.4.2. Architecture décentralisée des entrées/sorties
II.4.3. Décentralisation du traitement
CHAPITRE.III. LANGAGE DE PROGRAMMATION
III.1. Introduction
III.2. LANGAGE LADDER
III.2.1. Principe
III.2.2. Programmation
6.
I.2.3. FONCTIONS LOGIQUES
I.2.4.Verrouillage
III.2.5. Sorties multiples
Bibliographie
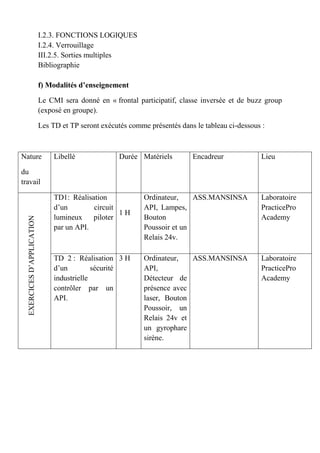
f) Modalités d’enseignement
Le CMI sera donné en « frontal participatif, classe inversée et de buzz group
(exposé en groupe).
Les TD et TP seront exécutés comme présentés dans le tableau ci-dessous :
Nature
du
travail
Libellé Durée Matériels Encadreur Lieu
EXERCICES
D’APPLICATION
TD1: Réalisation
d’un circuit
lumineux piloter
par un API.
1 H
Ordinateur,
API, Lampes,
Bouton
Poussoir et un
Relais 24v.
ASS.MANSINSA Laboratoire
PracticePro
Academy
TD 2 : Réalisation
d’un sécurité
industrielle
contrôler par un
API.
3 H Ordinateur,
API,
Détecteur de
présence avec
laser, Bouton
Poussoir, un
Relais 24v et
un gyrophare
sirène.
ASS.MANSINSA Laboratoire
PracticePro
Academy
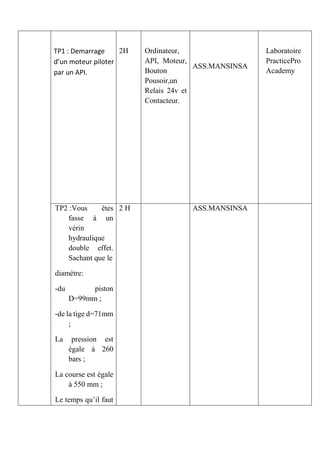
7.
TP1 : Demarrage
d’unmoteur piloter
par un API.
2H Ordinateur,
API, Moteur,
Bouton
Pousoir,un
Relais 24v et
Contacteur.
ASS.MANSINSA
Laboratoire
PracticePro
Academy
TP2 :Vous êtes
fasse à un
vérin
hydraulique
double effet.
Sachant que le
diamètre:
-du piston
D=99mm ;
-de la tige d=71mm
;
La pression est
égale à 260
bars ;
La course est égale
à 550 mm ;
Le temps qu’il faut
2 H ASS.MANSINSA
8.
pour que la
tigesorte est
de 3.7 s.
On vous demande
de calculer :
a) le débit du
fluide;
b) La puissance
hydraulique ;
c) Les efforts réels
de ce vérin.
g) Ressources matérielles
Pour gagner du temps et faciliter la compréhension, hormis le tableau et les craies,
nous allons faire usage des matériels didactiques suivants :
Un vidéoprojecteur ;
Une tablette PC ;
Un syllabus de l’EC ;
Ordinateurs ;
API S7-200 ;
Moteur Electrique ;
Détecteur de présence ;
Deux boutons poussoirs ;
Un gyrophare sirène ;
Relais 24V ;
Un Contacteur.
h) Ressource logicielle
Pour la bonne marche de cours, nous allons constamment utiliser les logiciels
professionnels ci-après :
WinPLC7
SIMATIC MANAGER
9.
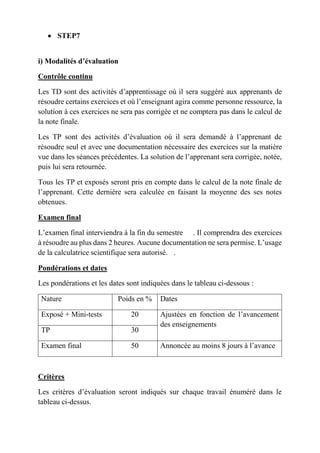
STEP7
i) Modalitésd’évaluation
Contrôle continu
Les TD sont des activités d’apprentissage où il sera suggéré aux apprenants de
résoudre certains exercices et où l’enseignant agira comme personne ressource, la
solution à ces exercices ne sera pas corrigée et ne comptera pas dans le calcul de
la note finale.
Les TP sont des activités d’évaluation où il sera demandé à l’apprenant de
résoudre seul et avec une documentation nécessaire des exercices sur la matière
vue dans les séances précédentes. La solution de l’apprenant sera corrigée, notée,
puis lui sera retournée.
Tous les TP et exposés seront pris en compte dans le calcul de la note finale de
l’apprenant. Cette dernière sera calculée en faisant la moyenne des ses notes
obtenues.
Examen final
L’examen final interviendra à la fin du semestre . Il comprendra des exercices
à résoudre au plus dans 2 heures. Aucune documentation ne sera permise. L’usage
de la calculatrice scientifique sera autorisé. .
Pondérations et dates
Les pondérations et les dates sont indiquées dans le tableau ci-dessous :
Nature Poids en % Dates
Exposé + Mini-tests 20 Ajustées en fonction de l’avancement
des enseignements
TP 30
Examen final 50 Annoncée au moins 8 jours à l’avance
Critères
Les critères d’évaluation seront indiqués sur chaque travail énuméré dans le
tableau ci-dessus.
10.
En cas d’échecconstaté sur la note globale contrôle continu + examen final, un
examen de rattrapage sera organisé par l’institution et seule sa note comptera
comme note globale.
j) Pénalités sur les travaux
Aucun apprenant ne peut être exempté d’un contrôle ou examen final. Toute
absence doit être motivée dans les 3 jours ouvrables qui suivent la fin de la période
de l’absence en s’adressant au Bureau de section. A défaut de cette motivation, la
note attribuée sera nulle.
k) Plagiat
Le plagiat est défini comme « le fait, dans une activité pédagogique évaluée, de
faire passer indûment pour sien des passages ou des idées tirées de l’œuvre
d’autrui ».
Lors de correction de tout travail individuel ou de groupe, une attention
particulière sera portée sur le plagiat. Tout travail suspecté de plagiat sera annulé.
11.
l) Bibliographie
1. GustaveLE BON, Capteurs industriels, 2014.
2. Georges Asch, LES CAPTEURS EN INSTRUMENTATION
INDUSTRIELLE, 2017.
3. HOARAU Philippe, Introduction sur les capteurs, 2011.
4. Raymond SIMONIN, LES CAPTEURS, 2019.
5. Christian BISSIERES, ACQUISITION D'UNE GRANDEUR
PHYSIQUE, 2018.
6. Alessandro, Automates programmables industriels, 2013.
7. L. BERGOUGNOUX, Utilisation des Automates programmables
industriels, 2017.
8. EL HAMMOUMI, Cours Automatismes Logiques & Industriels,
2020.
9. Philippe RAYMOND, Notes de cours - BTS MAI, 2019.
10. Lionel Lecointe. HAMM, Le LANGAGE LADDER, 2024.
11. MUHAMEDFELL, PROGRAMMATION DES API, 2024.
m) Responsable de l’EC
Coordonnées
Bergelin MANSINSA MATUETIMONA
Email: bmansinsa@gmail.com
Téléphone: (+243) 891396803
Disponibilité
Sur rendez-vous uniquement, par téléphone ou par courriel. Je reçois les appels
GSM de 8h30’ à 20h00 ; Je ne réponds pas aux messages GSM. Je suis joignable
sur les réseaux sociaux par message écrit uniquement.










![[FR] Papier Cetsis 2014 - PLC Checker](https://cdn.slidesharecdn.com/ss_thumbnails/cetsis2014final1-141126043043-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)

































