1
Thomas Grenier
Lab. CREATIS– Univ. of Lyon, France
thomas.grenier@insa-lyon.fr
Traitement du signal,
Filtrages Analogique et Numérique
Département Génie Electrique / 4GE
Département Génie Electrique
2.
2
Sommaire
I. Généralités
A- Définitions,Méthodologie de calcul et classification des filtres
B- Modélisation des filtres
II. Synthèse de filtres analogiques
III. Synthèse de filtre numériques
4
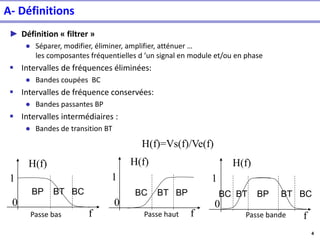
► Définition «filtrer »
● Séparer, modifier, éliminer, amplifier, atténuer …
les composantes fréquentielles d ’un signal en module et/ou en phase
▪ Intervalles de fréquences éliminées:
● Bandes coupées BC
▪ Intervalles de fréquence conservées:
● Bandes passantes BP
▪ Intervalles intermédiaires :
● Bandes de transition BT
f
H(f)
BP BT BC
1
0
f
H(f)
BC BT BP
1
0
Passe bas Passe haut
H(f)
BC BT BP BT BC
1
0
f
H(f)=Vs(f)/Ve(f)
Passe bande
A- Définitions
5.
5
A- Définitions
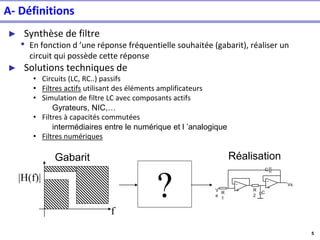
► Synthèsede filtre
• En fonction d ’une réponse fréquentielle souhaitée (gabarit), réaliser un
circuit qui possède cette réponse
► Solutions techniques de
• Circuits (LC, RC..) passifs
• Filtres actifs utilisant des éléments amplificateurs
• Simulation de filtre LC avec composants actifs
Gyrateurs, NIC,…
• Filtres à capacités commutées
intermédiaires entre le numérique et l ’analogique
• Filtres numériques
?
Gabarit
f
|H(f)|
+
C
C
R
2
R
1
V
e
Vs
+
Réalisation
6.
6
A- Méthodologie decalcul des filtres
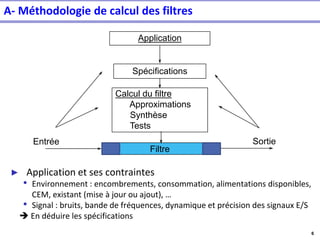
► Application et ses contraintes
• Environnement : encombrements, consommation, alimentations disponibles,
CEM, existant (mise à jour ou ajout), …
• Signal : bruits, bande de fréquences, dynamique et précision des signaux E/S
➔ En déduire les spécifications
Entrée Sortie
Filtre
Application
Spécifications
Calcul du filtre
Approximations
Synthèse
Tests
7.
7
A- Méthodologie decalcul des filtres
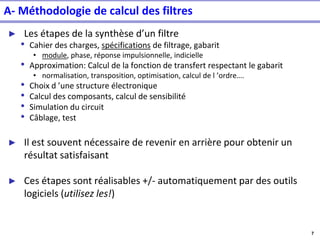
► Les étapes de la synthèse d’un filtre
• Cahier des charges, spécifications de filtrage, gabarit
• module, phase, réponse impulsionnelle, indicielle
• Approximation: Calcul de la fonction de transfert respectant le gabarit
• normalisation, transposition, optimisation, calcul de l ’ordre….
• Choix d ’une structure électronique
• Calcul des composants, calcul de sensibilité
• Simulation du circuit
• Câblage, test
► Il est souvent nécessaire de revenir en arrière pour obtenir un
résultat satisfaisant
► Ces étapes sont réalisables +/- automatiquement par des outils
logiciels (utilisez les!)
8.
8
A- Méthodologie :Spécifications de filtres
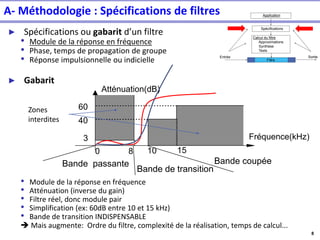
► Spécifications ou gabarit d’un filtre
• Module de la réponse en fréquence
• Phase, temps de propagation de groupe
• Réponse impulsionnelle ou indicielle
► Gabarit
• Module de la réponse en fréquence
• Atténuation (inverse du gain)
• Filtre réel, donc module pair
• Simplification (ex: 60dB entre 10 et 15 kHz)
• Bande de transition INDISPENSABLE
➔ Mais augmente: Ordre du filtre, complexité de la réalisation, temps de calcul...
Entrée Sortie
Filtre
Application
Spécifications
Calcul du filtre
Approximations
Synthèse
Tests
Atténuation(dB)
Fréquence(kHz)
8 10
0
60
40
3
15
Bande passante Bande coupée
Bande de transition
Zones
interdites
9.
9
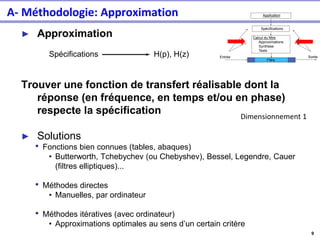
► Approximation
Spécifications H(p),H(z)
Trouver une fonction de transfert réalisable dont la
réponse (en fréquence, en temps et/ou en phase)
respecte la spécification
► Solutions
• Fonctions bien connues (tables, abaques)
• Butterworth, Tchebychev (ou Chebyshev), Bessel, Legendre, Cauer
(filtres elliptiques)...
• Méthodes directes
• Manuelles, par ordinateur
• Méthodes itératives (avec ordinateur)
• Approximations optimales au sens d’un certain critère
A- Méthodologie: Approximation
Entrée Sortie
Filtre
Application
Spécifications
Calcul du filtre
Approximations
Synthèse
Tests
Dimensionnement 1
10.
10
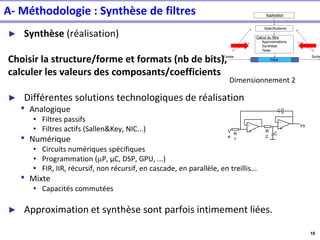
A- Méthodologie :Synthèse de filtres
► Synthèse (réalisation)
Choisir la structure/forme et formats (nb de bits),
calculer les valeurs des composants/coefficients
► Différentes solutions technologiques de réalisation
• Analogique
• Filtres passifs
• Filtres actifs (Sallen&Key, NIC...)
• Numérique
• Circuits numériques spécifiques
• Programmation (mP, µC, DSP, GPU, ...)
• FIR, IIR, récursif, non récursif, en cascade, en parallèle, en treillis...
• Mixte
• Capacités commutées
► Approximation et synthèse sont parfois intimement liées.
+
C
C
R
2
R
1
V
e
Vs
+
Entrée Sortie
Filtre
Application
Spécifications
Calcul du filtre
Approximations
Synthèse
Tests
Dimensionnement 2
11.
11
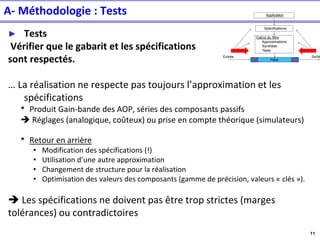
A- Méthodologie :Tests
► Tests
Vérifier que le gabarit et les spécifications
sont respectés.
… La réalisation ne respecte pas toujours l’approximation et les
spécifications
• Produit Gain-bande des AOP, séries des composants passifs
➔ Réglages (analogique, coûteux) ou prise en compte théorique (simulateurs)
• Retour en arrière
• Modification des spécifications (!)
• Utilisation d’une autre approximation
• Changement de structure pour la réalisation
• Optimisation des valeurs des composants (gamme de précision, valeurs « clés »).
➔ Les spécifications ne doivent pas être trop strictes (marges
tolérances) ou contradictoires
Entrée Sortie
Filtre
Application
Spécifications
Calcul du filtre
Approximations
Synthèse
Tests
12.
12
A- Classification desfiltres
► Classification fréquentielle
• Passe-bas
Atténuation des hautes fréquences
• Passe-haut
Atténuation des basses fréquences
• Passe-bande
Atténuation des hautes et des basses fréquences
• Coupe-bande ou réjecteur
Atténuation d’une bande de fréquences intermédiaires
• Autres: Dérivateur, intégrateur, transformateur de Hilbert, réseau
déphaseur (passe-tout)
13.
13
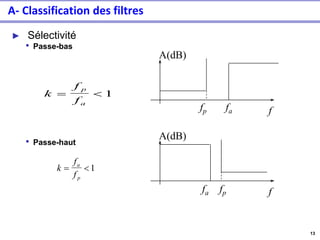
A- Classification desfiltres
► Sélectivité
• Passe-bas
• Passe-haut
k
f
f
p
a
= 1
f
fa
fp
A(dB)
k
f
f
a
p
= 1
f
fa fp
A(dB)
14.
14
A- Classification desfiltres
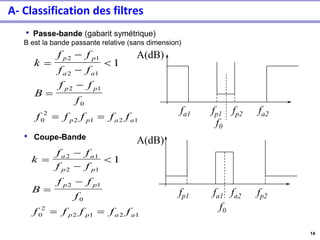
• Passe-bande (gabarit symétrique)
B est la bande passante relative (sans dimension)
• Coupe-Bande
k
f f
f f
B
f f
f
f f f f f
p p
a a
p p
p p a a
=
−
−
=
−
= =
2 1
2 1
2 1
0
0
2
2 1 2 1
1
k
f f
f f
B
f f
f
f f f f f
a a
p p
p p
p p a a
=
−
−
=
−
= =
2 1
2 1
2 1
0
0
2
2 1 2 1
1
fp1 fa1 fa2 fp2
f0
fa1 fp1 fp2 fa2
f0
A(dB)
A(dB)
16
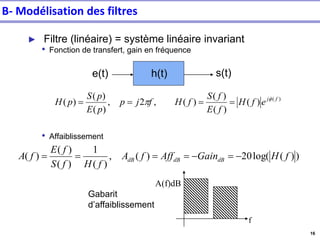
B- Modélisation desfiltres
► Filtre (linéaire) = système linéaire invariant
• Fonction de transfert, gain en fréquence
• Affaiblissement
e(t) s(t)
h(t)
)
(
)
(
)
(
)
(
)
(
,
2
,
)
(
)
(
)
( f
j
e
f
H
f
E
f
S
f
H
f
j
p
p
E
p
S
p
H
=
=
=
=
)
)
(
log(
20
)
(
,
)
(
1
)
(
)
(
)
( f
H
Gain
Aff
f
A
f
H
f
S
f
E
f
A dB
dB
dB −
=
−
=
=
=
=
Gabarit
d’affaiblissement
f
A(f)dB
17.
17
B- Modélisation
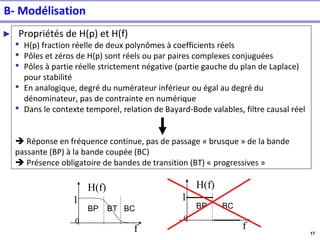
► Propriétésde H(p) et H(f)
• H(p) fraction réelle de deux polynômes à coefficients réels
• Pôles et zéros de H(p) sont réels ou par paires complexes conjuguées
• Pôles à partie réelle strictement négative (partie gauche du plan de Laplace)
pour stabilité
• En analogique, degré du numérateur inférieur ou égal au degré du
dénominateur, pas de contrainte en numérique
• Dans le contexte temporel, relation de Bayard-Bode valables, filtre causal réel
➔ Réponse en fréquence continue, pas de passage « brusque » de la bande
passante (BP) à la bande coupée (BC)
➔ Présence obligatoire de bandes de transition (BT) « progressives »
f
H(f)
BP BT BC
1
0
f
H(f)
BP BC
1
0
18.
18
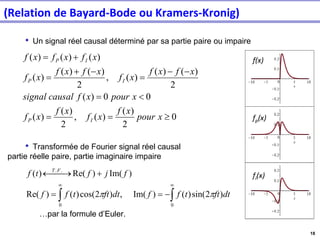
(Relation de Bayard-Bodeou Kramers-Kronig)
• Un signal réel causal déterminé par sa partie paire ou impaire
• Transformée de Fourier signal réel causal
partie réelle paire, partie imaginaire impaire
…par la formule d’Euler.
0
2
)
(
)
(
,
2
)
(
)
(
0
0
)
(
2
)
(
)
(
)
(
,
2
)
(
)
(
)
(
)
(
)
(
)
(
=
=
=
−
−
=
−
+
=
+
=
x
pour
x
f
x
f
x
f
x
f
x
pour
x
f
causal
signal
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
I
P
I
P
I
P
−
=
=
+
⎯
⎯ →
0
0
.
.
)
2
sin(
)
(
)
Im(
,
)
2
cos(
)
(
)
Re(
)
Im(
)
Re(
)
(
dt
ft
t
f
f
dt
ft
t
f
f
f
j
f
t
f F
T
f(x)
fp(x)
fi(x)
19.
19
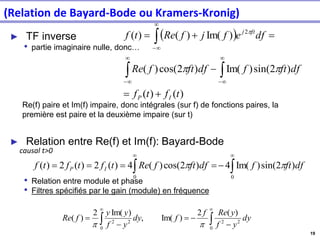
► TF inverse
•partie imaginaire nulle, donc…
Re(f) paire et Im(f) impaire, donc intégrales (sur f) de fonctions paires, la
première est paire et la deuxième impaire (sur t)
► Relation entre Re(f) et Im(f): Bayard-Bode
• Relation entre module et phase
• Filtres spécifiés par le gain (module) en fréquence
( )
)
(
)
(
)
2
sin(
)
Im(
)
2
cos(
)
(
)
Im(
)
(
)
( 2
t
f
t
f
df
ft
f
df
ft
f
Re
df
e
f
j
f
Re
t
f
I
P
ft
j
+
=
−
=
+
=
−
−
−
−
=
=
=
=
0
0
)
2
sin(
)
Im(
4
)
2
cos(
)
(
4
)
(
2
)
(
2
)
( df
ft
f
df
ft
f
Re
t
f
t
f
t
f I
P
−
−
=
−
=
0
2
2
0
2
2
)
(
2
)
Im(
,
)
Im(
2
)
( dy
y
f
y
Re
f
f
dy
y
f
y
y
f
Re
causal t>0
(Relation de Bayard-Bode ou Kramers-Kronig)
20.
20
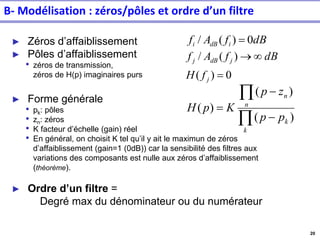
► Zéros d’affaiblissement
►Pôles d’affaiblissement
• zéros de transmission,
zéros de H(p) imaginaires purs
► Forme générale
• pk: pôles
• zn: zéros
• K facteur d’échelle (gain) réel
• En général, on choisit K tel qu’il y ait le maximun de zéros
d’affaiblissement (gain=1 (0dB)) car la sensibilité des filtres aux
variations des composants est nulle aux zéros d’affaiblissement
(théorème).
► Ordre d’un filtre =
Degré max du dénominateur ou du numérateur
dB
f
A
f i
dB
i 0
)
(
/ =
0
)
(
)
(
/
=
→
j
j
dB
j
f
H
dB
f
A
f
−
−
=
k
k
n
n
p
p
z
p
K
p
H
)
(
)
(
)
(
B- Modélisation : zéros/pôles et ordre d’un filtre
21.
21
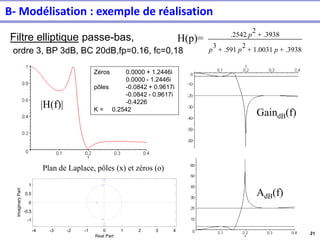
Filtre elliptique passe-bas,
ordre3, BP 3dB, BC 20dB,fp=0.16, fc=0,18
-4 -3 -2 -1 0 1 2 3 4
-1
-0.5
0
0.5
1
Real Part
Imaginary
Part
Plan de Laplace, pôles (x) et zéros (o)
|H(f)|
+
.2542 p
2
.3938
+ + +
p
3
.591 p
2
1.0031 p .3938
H(p)=
AdB(f)
GaindB(f)
Zéros 0.0000 + 1.2446i
0.0000 - 1.2446i
pôles -0.0842 + 0.9617i
-0.0842 - 0.9617i
-0.4226
K = 0.2542
B- Modélisation : exemple de réalisation
22.
22
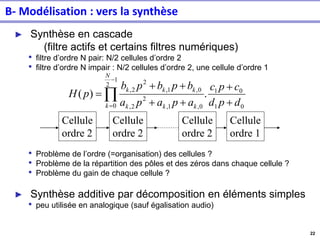
► Synthèse encascade
(filtre actifs et certains filtres numériques)
• filtre d’ordre N pair: N/2 cellules d’ordre 2
• filtre d’ordre N impair : N/2 cellules d’ordre 2, une cellule d’ordre 1
• Problème de l’ordre (=organisation) des cellules ?
• Problème de la répartition des pôles et des zéros dans chaque cellule ?
• Problème du gain de chaque cellule ?
► Synthèse additive par décomposition en éléments simples
• peu utilisée en analogique (sauf égalisation audio)
0
1
0
1
1
2
0 0
,
1
,
2
2
,
0
,
1
,
2
2
,
.
)
(
d
p
d
c
p
c
a
p
a
p
a
b
p
b
p
b
p
H
N
k k
k
k
k
k
k
+
+
+
+
+
+
=
−
=
Cellule
ordre 2
Cellule
ordre 2
Cellule
ordre 2
Cellule
ordre 1
B- Modélisation : vers la synthèse
23.
23
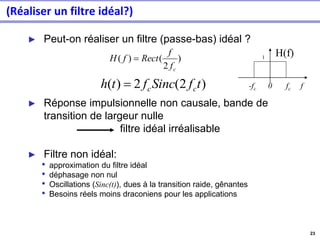
(Réaliser un filtreidéal?)
► Peut-on réaliser un filtre (passe-bas) idéal ?
► Réponse impulsionnelle non causale, bande de
transition de largeur nulle
filtre idéal irréalisable
► Filtre non idéal:
• approximation du filtre idéal
• déphasage non nul
• Oscillations (Sinc(t)), dues à la transition raide, gênantes
• Besoins réels moins draconiens pour les applications
)
2
(
)
(
c
f
f
Rect
f
H =
-fc 0 fc f
H(f)
1
)
2
(
2
)
( t
f
Sinc
f
t
h c
c
=
24.
24
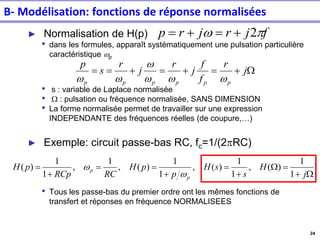
B- Modélisation: fonctionsde réponse normalisées
► Normalisation de H(p)
• dans les formules, apparaît systématiquement une pulsation particulière
caractéristique wp
• s : variable de Laplace normalisée
• W : pulsation ou fréquence normalisée, SANS DIMENSION
• La forme normalisée permet de travailler sur une expression
INDEPENDANTE des fréquences réelles (de coupure,…)
► Exemple: circuit passe-bas RC, fc=1/(2RC)
• Tous les passe-bas du premier ordre ont les mêmes fonctions de
transfert et réponses en fréquence NORMALISEES
f
j
r
j
r
p
w 2
+
=
+
=
W
+
=
+
=
+
=
= j
r
f
f
j
r
j
r
s
p
p
p
p
p
p
p w
w
w
w
w
w
W
+
=
W
+
=
+
=
=
+
=
j
H
s
s
H
p
p
H
RC
RCp
p
H
p
p
1
1
)
(
,
1
1
)
(
,
1
1
)
(
,
1
,
1
1
)
(
w
w
25.
25
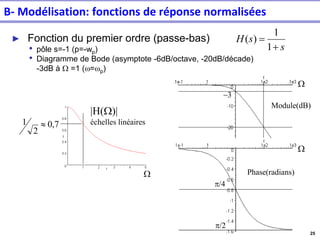
► Fonction dupremier ordre (passe-bas)
• pôle s=-1 (p=-wp)
• Diagramme de Bode (asymptote -6dB/octave, -20dB/décade)
-3dB à W =1 (w=wp)
s
s
H
+
=
1
1
)
(
|H(W)|
échelles linéaires
7
,
0
2
1
Module(dB)
Phase(radians)
/4
/2
−3
W
W
W
B- Modélisation: fonctions de réponse normalisées
26.
26
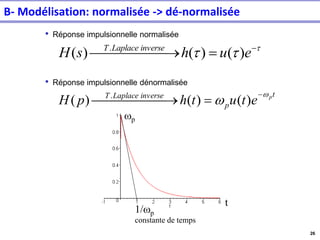
• Réponse impulsionnellenormalisée
• Réponse impulsionnelle dénormalisée
−
=
⎯
⎯
⎯
⎯
⎯ →
⎯ e
u
h
s
H inverse
Laplace
T
)
(
)
(
)
( .
t
p
inverse
Laplace
T p
e
t
u
t
h
p
H
w
w
−
=
⎯
⎯
⎯
⎯
⎯ →
⎯ )
(
)
(
)
( .
wp
1/wp
constante de temps
t
B- Modélisation: normalisée -> dé-normalisée
27.
27
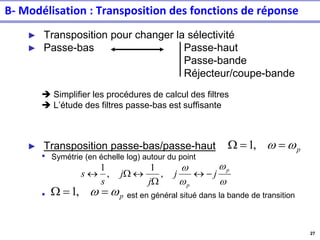
B- Modélisation :Transposition des fonctions de réponse
► Transposition pour changer la sélectivité
► Passe-bas Passe-haut
Passe-bande
Réjecteur/coupe-bande
➔ Simplifier les procédures de calcul des filtres
➔ L’étude des filtres passe-bas est suffisante
► Transposition passe-bas/passe-haut
• Symétrie (en échelle log) autour du point
• est en général situé dans la bande de transition
w
w
w
w p
p
j
j
j
j
s
s −
W
W
,
1
,
1
p
w
w =
=
W ,
1
p
w
w =
=
W ,
1
28.
28
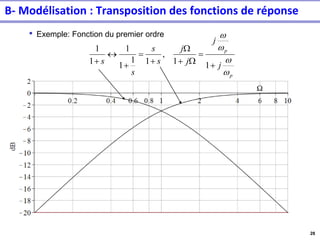
• Exemple: Fonctiondu premier ordre
p
p
j
j
j
j
s
s
s
s
w
w
w
w
+
=
W
+
W
+
=
+
+ 1
1
,
1
1
1
1
1
1
B- Modélisation : Transposition des fonctions de réponse
29.
29
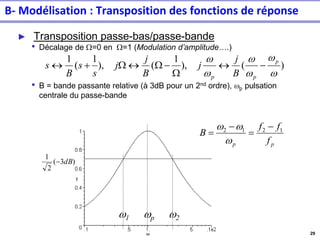
► Transposition passe-bas/passe-bande
•Décalage de W=0 en W=1 (Modulation d’amplitude….)
• B = bande passante relative (à 3dB pour un 2nd ordre), wp pulsation
centrale du passe-bande
)
(
),
1
(
),
1
(
1
w
w
w
w
w
w p
p
p B
j
j
B
j
j
s
s
B
s −
W
−
W
W
+
w1 wp w2
)
3
(
2
1
dB
−
p
p f
f
f
B 1
2
1
2 −
=
−
=
w
w
w
B- Modélisation : Transposition des fonctions de réponse
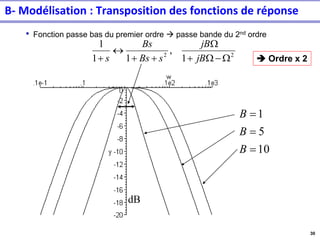
30.
30
• Fonction passebas du premier ordre → passe bande du 2nd ordre
2
2
1
,
1
1
1
W
−
W
+
W
+
+
+ jB
jB
s
Bs
Bs
s
10
5
1
=
=
=
B
B
B
dB
➔ Ordre x 2
B- Modélisation : Transposition des fonctions de réponse
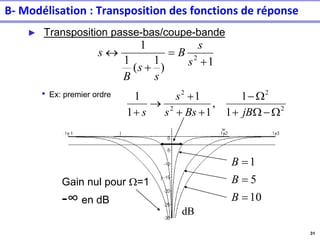
31.
31
► Transposition passe-bas/coupe-bande
•Ex: premier ordre
1
)
1
(
1
1
2
+
=
+
s
s
B
s
s
B
s
2
2
2
2
1
1
,
1
1
1
1
W
−
W
+
W
−
+
+
+
→
+ jB
Bs
s
s
s
dB
10
5
1
=
=
=
B
B
B
Gain nul pour W=1
-∞ en dB
B- Modélisation : Transposition des fonctions de réponse
32.
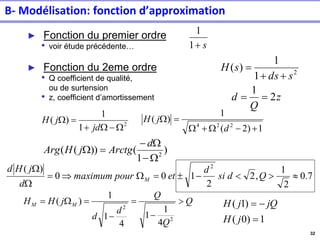
32
► Fonction dupremier ordre
• voir étude précédente…
► Fonction du 2eme ordre
• Q coefficient de qualité,
ou de surtension
• z, coefficient d’amortissement
s
+
1
1
z
Q
d
s
ds
s
H
2
1
1
1
)
( 2
=
=
+
+
=
2
1
1
)
(
W
−
W
+
=
W
jd
j
H
1
)
2
(
1
)
(
2
2
4
+
−
W
+
W
=
W
d
j
H
)
1
(
))
(
( 2
W
−
W
−
=
W
d
Arctg
j
H
Arg
7
.
0
2
1
,
2
2
1
0
0
)
( 2
−
=
W
=
W
W
Q
d
si
d
et
pour
maximum
d
j
H
d
M
Q
Q
Q
d
d
j
H
H M
M
−
=
−
=
W
=
2
2
4
1
1
4
1
1
)
(
1
)
0
(
)
1
(
=
−
=
j
H
jQ
j
H
B- Modélisation: fonction d’approximation
33.
33
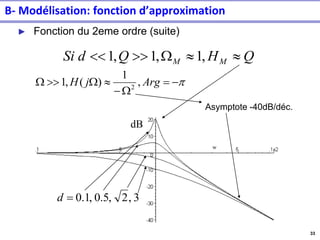
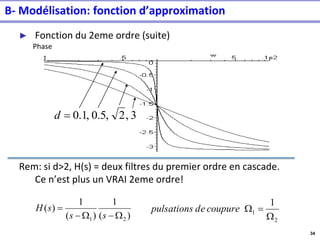
► Fonction du2eme ordre (suite)
Q
H
Q
d
Si M
M
W
,
1
,
1
,
1
−
=
W
−
W
W Arg
j
H ,
1
)
(
,
1 2
Asymptote -40dB/déc.
dB
3
,
2
,
5
.
0
,
1
.
0
=
d
B- Modélisation: fonction d’approximation
34.
34
► Fonction du2eme ordre (suite)
Phase
Rem: si d>2, H(s) = deux filtres du premier ordre en cascade.
Ce n’est plus un VRAI 2eme ordre!
3
,
2
,
5
.
0
,
1
.
0
=
d
)
(
1
)
(
1
)
(
2
1 W
−
W
−
=
s
s
s
H
2
1
1
W
=
W
coupure
de
pulsations
B- Modélisation: fonction d’approximation
35.
35
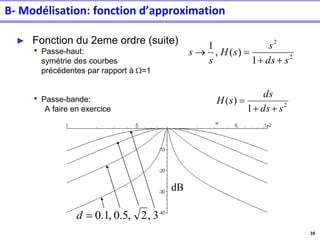
► Fonction du2eme ordre (suite)
• Passe-haut:
symétrie des courbes
précédentes par rapport à W=1
• Passe-bande:
A faire en exercice
2
2
1
)
(
,
1
s
ds
s
s
H
s
s
+
+
=
→
2
1
)
(
s
ds
ds
s
H
+
+
=
dB
3
,
2
,
5
.
0
,
1
.
0
=
d
B- Modélisation: fonction d’approximation
36.
36
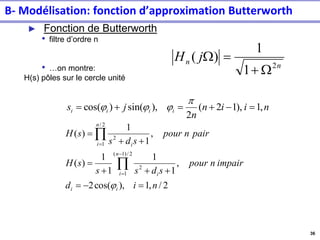
► Fonction deButterworth
• filtre d’ordre n
• …on montre:
H(s) pôles sur le cercle unité
n
n j
H
2
1
1
)
(
W
+
=
W
n
i
i
n
n
j
s i
i
i
i ,
1
),
1
2
(
2
),
sin(
)
cos( =
−
+
=
+
=
2
/
,
1
),
cos(
2
,
1
1
1
1
)
(
,
1
1
)
(
2
/
)
1
(
1
2
2
/
1
2
n
i
d
impair
n
pour
s
d
s
s
s
H
pair
n
pour
s
d
s
s
H
i
i
n
i i
n
i i
=
−
=
+
+
+
=
+
+
=
−
=
=
B- Modélisation: fonction d’approximation Butterworth
37.
37
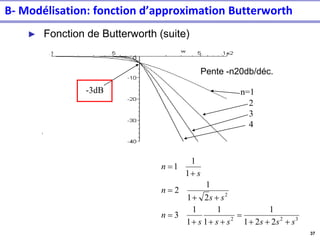
► Fonction deButterworth (suite)
• Fonctions passe-bas H(s)
n=1
2
3
4
Pente -n20db/déc.
-3dB
3
2
2
2
2
2
1
1
1
1
1
1
3
2
1
1
2
1
1
1
s
s
s
s
s
s
n
s
s
n
s
n
+
+
+
=
+
+
+
=
+
+
=
+
=
B- Modélisation: fonction d’approximation Butterworth
38.
38
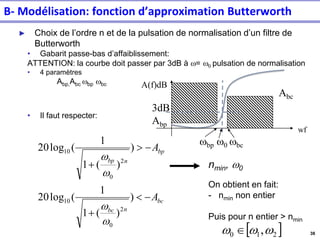
► Choix del’ordre n et de la pulsation de normalisation d’un filtre de
Butterworth
• Gabarit passe-bas d’affaiblissement:
ATTENTION: la courbe doit passer par 3dB à w= w0 pulsation de normalisation
• 4 paramètres
Abp,Abc wbp wbc
• Il faut respecter:
wf
A(f)dB
3dB
Abp
Abc
wbp w0 wbc
bc
n
bc
bp
n
bp
A
A
−
+
−
+
)
)
(
1
1
(
log
20
)
)
(
1
1
(
log
20
2
0
10
2
0
10
w
w
w
w
nmin, w0
On obtient en fait:
- nmin non entier
Puis pour n entier > nmin
2
1
0 ,w
w
w
B- Modélisation: fonction d’approximation Butterworth
39.
39
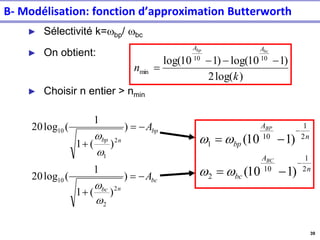
► Sélectivité k=wbp/wbc
► On obtient:
► Choisir n entier > nmin
)
log(
2
)
1
10
log(
)
1
10
log( 10
10
min
k
n
bc
bp A
A
−
−
−
=
bc
n
bc
bp
n
bp
A
A
−
=
+
−
=
+
)
)
(
1
1
(
log
20
)
)
(
1
1
(
log
20
2
2
10
2
1
10
w
w
w
w
n
A
bc
n
A
bp
BC
BP
2
1
10
2
2
1
10
1
)
1
10
(
)
1
10
(
−
−
−
=
−
=
w
w
w
w
B- Modélisation: fonction d’approximation Butterworth
42
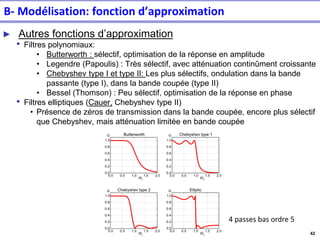
► Autres fonctionsd’approximation
• Filtres polynomiaux:
• Butterworth : sélectif, optimisation de la réponse en amplitude
• Legendre (Papoulis) : Très sélectif, avec atténuation continûment croissante
• Chebyshev type I et type II: Les plus sélectifs, ondulation dans la bande
passante (type I), dans la bande coupée (type II)
• Bessel (Thomson) : Peu sélectif, optimisation de la réponse en phase
• Filtres elliptiques (Cauer, Chebyshev type II)
• Présence de zéros de transmission dans la bande coupée, encore plus sélectif
que Chebyshev, mais atténuation limitée en bande coupée
4 passes bas ordre 5
B- Modélisation: fonction d’approximation
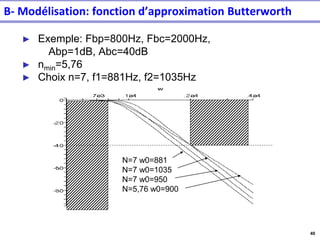
43.
43
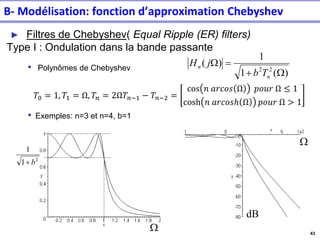
► Filtres deChebyshev( Equal Ripple (ER) filters)
Type I : Ondulation dans la bande passante
• Polynômes de Chebyshev
• Exemples: n=3 et n=4, b=1
)
(
1
1
)
(
2
2
W
+
=
W
n
n
T
b
j
H
2
1
1
b
+
W
W
dB
𝑇0 = 1, 𝑇1 = Ω, 𝑇𝑛 = 2Ω𝑇𝑛−1 − 𝑇𝑛−2 =
cos 𝑛 𝑎𝑟𝑐𝑜𝑠 Ω 𝑝𝑜𝑢𝑟 Ω ≤ 1
cosh 𝑛 𝑎𝑟𝑐𝑜𝑠ℎ Ω 𝑝𝑜𝑢𝑟 Ω > 1
B- Modélisation: fonction d’approximation Chebyshev
44.
44
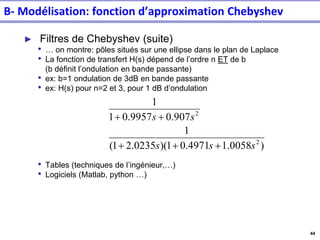
► Filtres deChebyshev (suite)
• … on montre: pôles situés sur une ellipse dans le plan de Laplace
• La fonction de transfert H(s) dépend de l’ordre n ET de b
(b définit l’ondulation en bande passante)
• ex: b=1 ondulation de 3dB en bande passante
• ex: H(s) pour n=2 et 3, pour 1 dB d’ondulation
• Tables (techniques de l’ingénieur,…)
• Logiciels (Matlab, python …)
)
0058
.
1
4971
.
0
1
)(
0235
.
2
1
(
1
907
.
0
9957
.
0
1
1
2
2
s
s
s
s
s
+
+
+
+
+
B- Modélisation: fonction d’approximation Chebyshev
45.
45
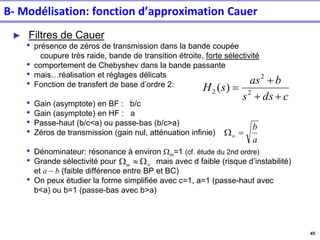
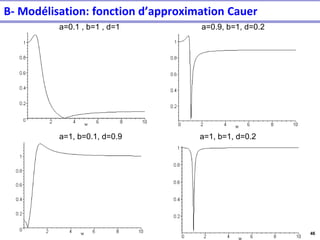
► Filtres deCauer
• présence de zéros de transmission dans la bande coupée
coupure très raide, bande de transition étroite, forte sélectivité
• comportement de Chebyshev dans la bande passante
• mais…réalisation et réglages délicats
• Fonction de transfert de base d’ordre 2:
• Gain (asymptote) en BF : b/c
• Gain (asymptote) en HF : a
• Passe-haut (b/c<a) ou passe-bas (b/c>a)
• Zéros de transmission (gain nul, atténuation infinie)
• Dénominateur: résonance à environ Wm=1 (cf. étude du 2nd ordre)
• Grande sélectivité pour mais avec d faible (risque d’instabilité)
et a ~ b (faible différence entre BP et BC)
• On peux étudier la forme simplifiée avec c=1, a=1 (passe-haut avec
b<a) ou b=1 (passe-bas avec b>a)
c
ds
s
b
as
s
H
+
+
+
= 2
2
2 )
(
a
b
=
W
W
Wm
B- Modélisation: fonction d’approximation Cauer
47
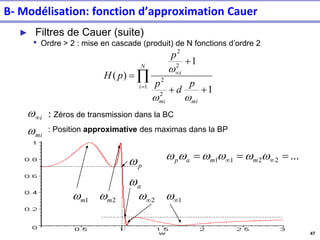
► Filtres deCauer (suite)
• Ordre > 2 : mise en cascade (produit) de N fonctions d’ordre 2
=
+
+
+
=
N
i
mi
mi
i
p
d
p
p
p
H
1
2
2
2
2
1
1
)
(
w
w
w
mi
i
w
w : Zéros de transmission dans la BC
: Position approximative des maximas dans la BP
1
2
2
1
w
w
w
w m
m
a
p
w
w ...
2
2
1
1 =
=
=
w
w
w
w
w
w m
m
a
p
B- Modélisation: fonction d’approximation Cauer
48.
48
► Fonctions passe-tout
•Module |H(f)|= 1, action sur la phase
)
1
(
2
1
1
)
(
)
(
2
1
1
)
(
2
2
2
2
1
W
−
W
−
=
+
+
+
−
=
W
−
=
+
−
=
b
a
arctg
phase
bs
as
bs
as
s
H
arctg
phase
s
s
s
H
B- Modélisation: fonction passe tout