La méthode des éléments finis (MEF) est une approche numérique pour résoudre des équations aux dérivées partielles, applicable dans des domaines variés comme le génie civil et la mécanique. Elle a évolué depuis ses origines au XVIIIe siècle jusqu'à devenir un outil puissant pour des simulations complexes. Le document expose également l'historique, les étapes de modélisation et les techniques d'approximation nodale utilisées dans la MEF.
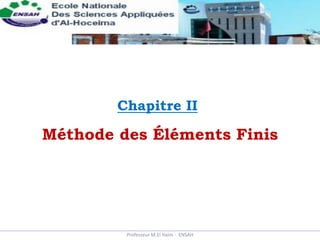

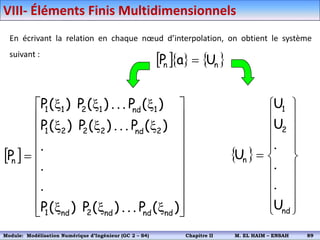
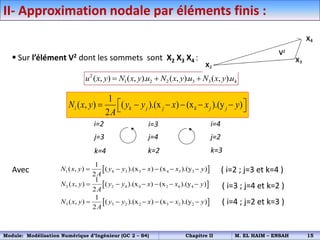
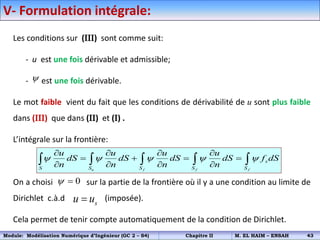
![II- Approximation nodale par éléments finis :
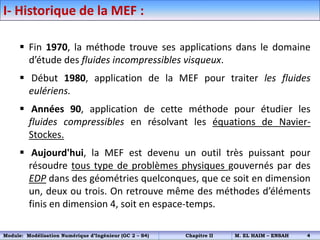
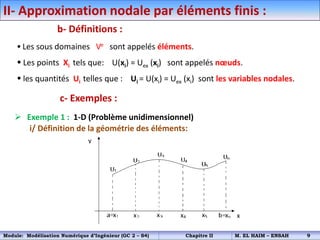
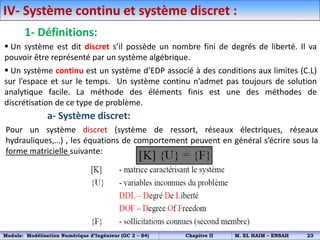
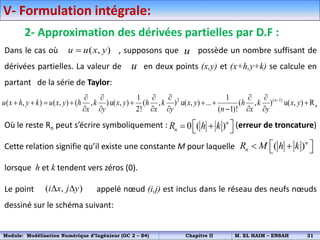
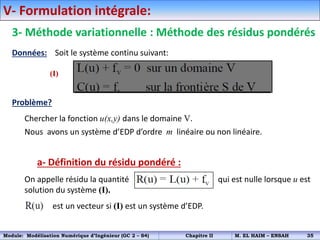
[a,b] est divisé en intervalles [ xi ; xi+1 ].
ii/ Approximation nodale sur chaque élément:
Pour l’élément V1 = [ x1 ; x2 ]:
et sont linéaires en x telles que:
N1(x1) = 1 ; N2(x1) = 0
N1(x2) = 0 ; N2(x2) = 1
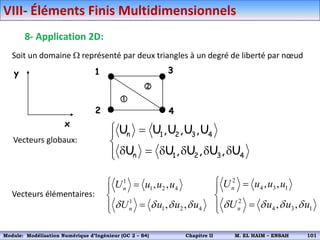
N1(x) = a.x + b
N1(x1) = 1 = a.x1 + b
N1(x2) = 0 = a.x2 + b
Alors : Ou encore:
De même on trouve que :
1( )
N x 2 ( )
N x
1 2
1
a
x x
et 2
1 2
x
b
x x
2
1
1 2
( )
x x
N x
x x
1
2
2 1
( )
x x
N x
x x
1
1 1 2 2
( ) ( ). ( ).
u x N x u N x u
( )
( )
( )
j
i
j i i j
x x
N x
x x
Module: Modélisation Numérique d’Ingénieur (GC 2 – S4) Chapitre II M. EL HAIM – ENSAH 10](https://image.slidesharecdn.com/24032022075339668574813012-220522055805-1a772ac0/85/24032022075339668574813012-pdf-11-320.jpg)
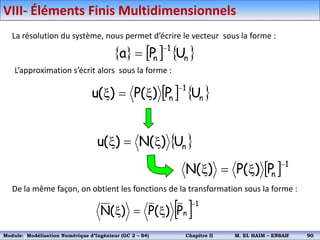
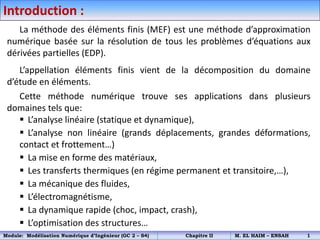
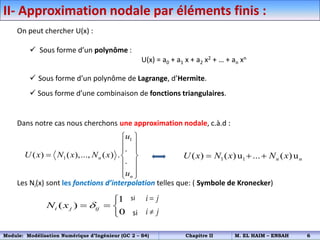
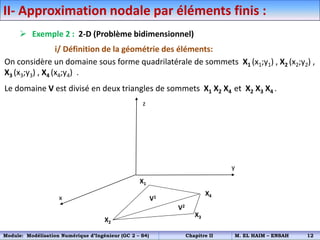
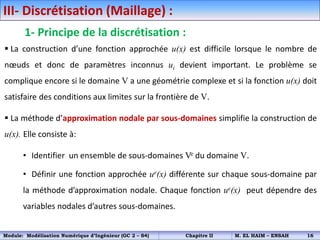
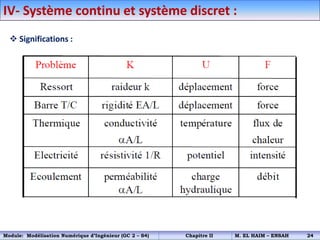
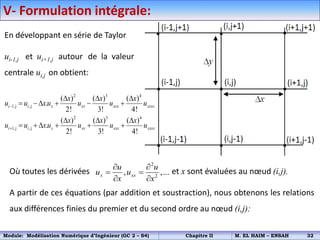
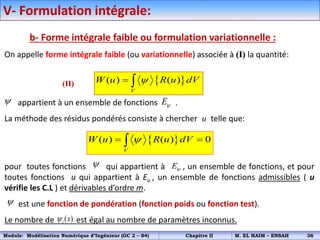
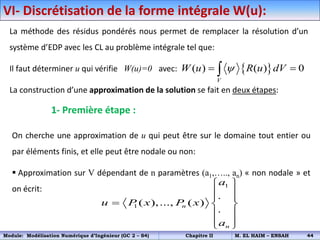
![Donc sur l’élément V1 = [ x1 ; x2 ] , l’approximation s’écrit comme suit:
Avec:
II- Approximation nodale par éléments finis :
1
1 1 2 2
( ) ( ). ( ).
u x N x u N x u
2
1
1 2
( )
x x
N x
x x
1
2
2 1
( )
x x
N x
x x
et
Pour l’élément V2 = [ x2 ; x3 ]:
Où et sont linéaires telles que:
N1(x2) = 1 ; N2(x2) = 0
N1(x3) = 0 ; N2(x3) = 1
On aura alors :
De même pour les autres trois éléments V3 = [ x3 ; x4 ], V4 = [ x4 ; x5 ] et V5 = [ x5 ; xn=b].
2
1 2 2 3
( ) ( ). ( ).
u x N x u N x u
1( )
N x 2( )
N x
3
1
2 3
( )
x x
N x
x x
et
2
2
3 2
( )
x x
N x
x x
Remarques:
est différente sur chaque élément Ve.
L’approximation sur [a,b] est donc:
( )
e
u x
1 2 3 4 5
( ) ( ) ( ) ( ) ( ) ( )
u x u x u x u x u x u x
Module: Modélisation Numérique d’Ingénieur (GC 2 – S4) Chapitre II M. EL HAIM – ENSAH 11](https://image.slidesharecdn.com/24032022075339668574813012-220522055805-1a772ac0/85/24032022075339668574813012-pdf-12-320.jpg)
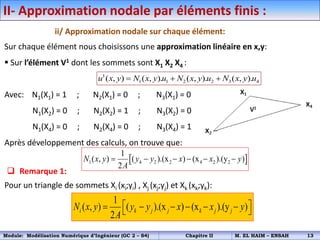
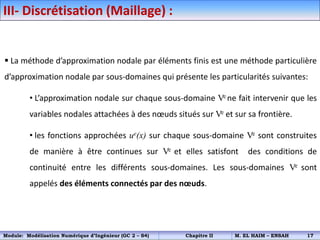
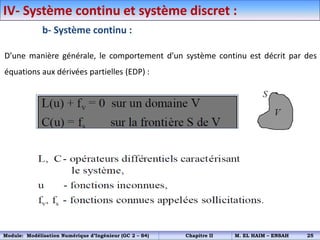
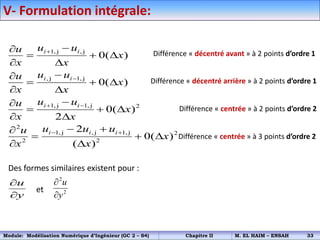
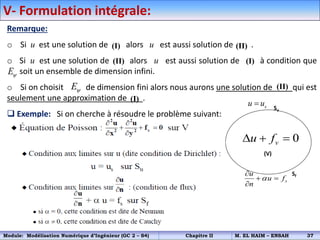
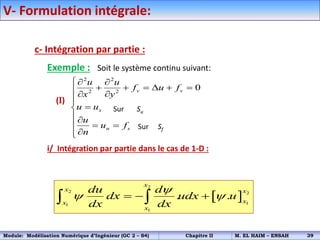
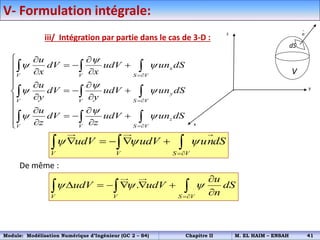
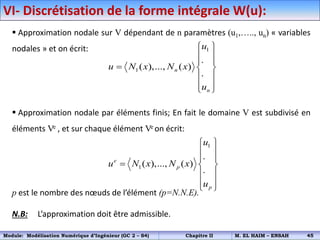
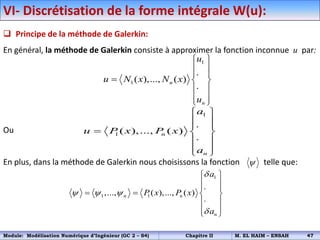
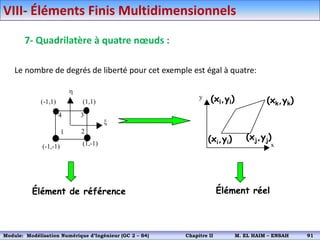
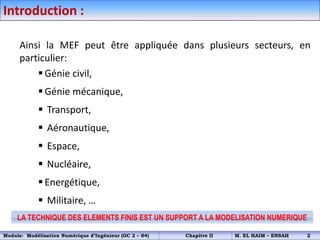
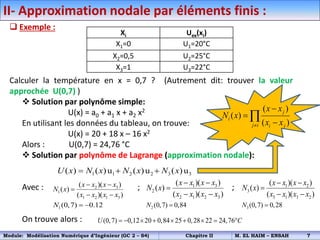
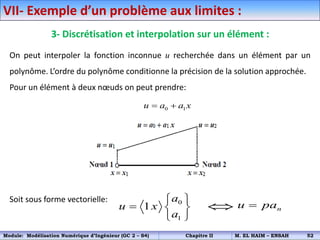
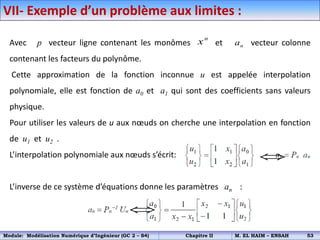
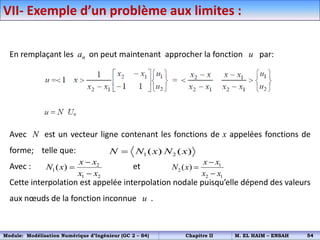
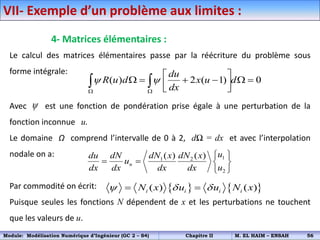
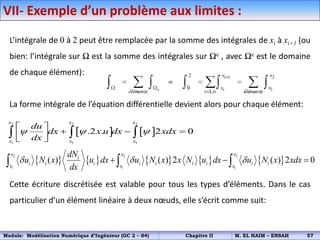
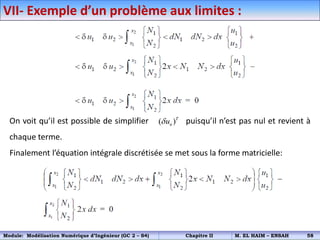
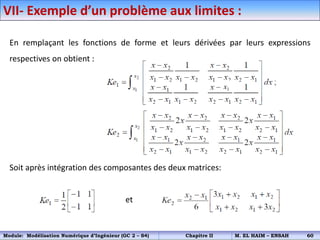
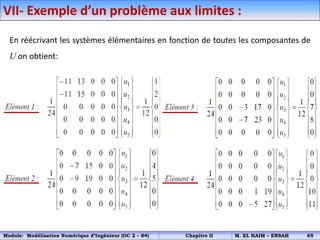
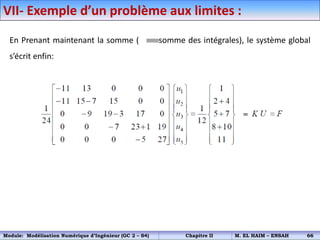
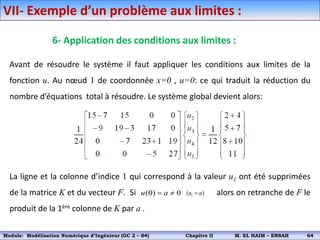
![VII- Exemple d’un problème aux limites :
1- Formulation du problème:
Traitons la cas d’un problème régit par une équation différentielle. Dans ce cas le
problème est formulé directement sous forme mathématique et revient à déterminer
une fonction inconnue u définie dans un domaine Ω et régie par une équation
différentielle avec des conditions aux limites.
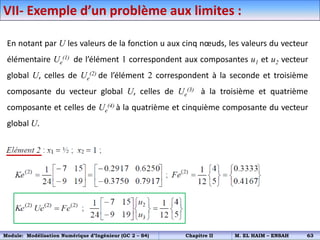
On prend comme exemple l’équation différentielle ordinaire d’ordre un suivante:
avec
Dans ce problème, Ω = [0, 2] est un domaine de dimension 1.
Sa frontière se réduit à deux points : 0 et 2.
La solution exacte de cette équation est:
2 ( 1) 0
du
x u
dx
(0) 0
u
2
1 x
ex
u e
Module: Modélisation Numérique d’Ingénieur (GC 2 – S4) Chapitre II M. EL HAIM – ENSAH 49](https://image.slidesharecdn.com/24032022075339668574813012-220522055805-1a772ac0/85/24032022075339668574813012-pdf-50-320.jpg)
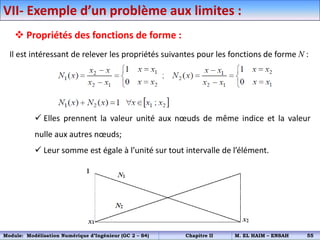
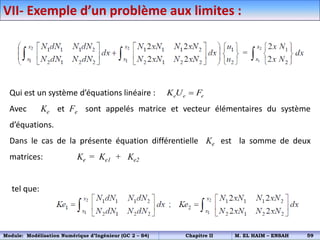
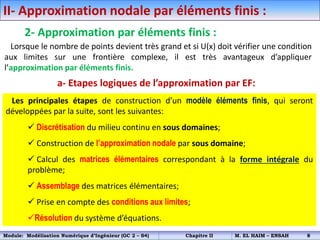
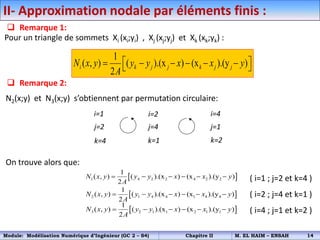
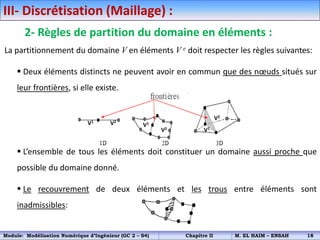
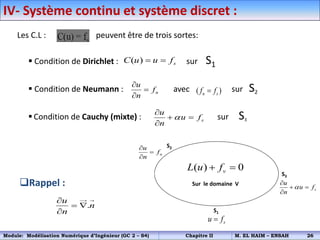
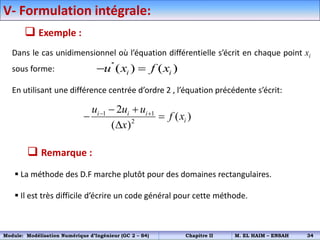
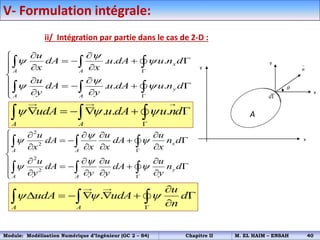
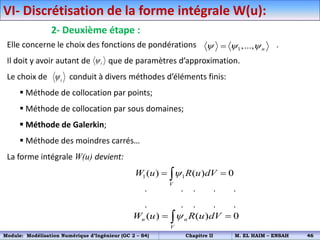
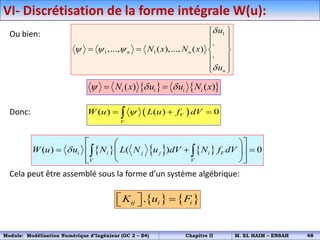
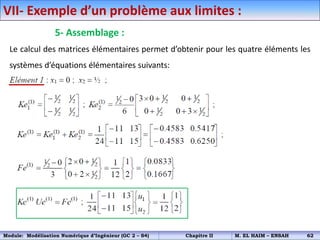
![VII- Exemple d’un problème aux limites :
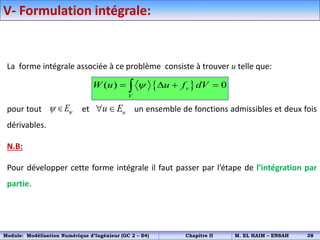
Le vecteur Fe est donné par :
Soit:
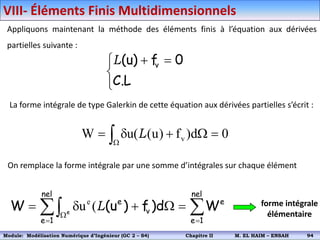
Finalement, la forme intégrale de l’équation différentielle devient alors pour
chaque élément Ωe = [x1, x2] sous forme matricielle qui s’écrit comme suit :
1 1 2
1 2 1 2
2 1 2 1
1 2 1 2 2 1 2
2
3
1 1
1
3
1 1 2
2 6 3
u x x
x x x x
x x x x
x x x x u x x
Ke Ue Fe
Module: Modélisation Numérique d’Ingénieur (GC 2 – S4) Chapitre II M. EL HAIM – ENSAH 61](https://image.slidesharecdn.com/24032022075339668574813012-220522055805-1a772ac0/85/24032022075339668574813012-pdf-62-320.jpg)
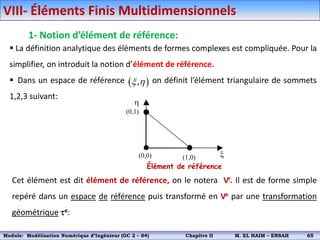
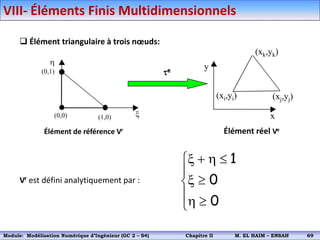
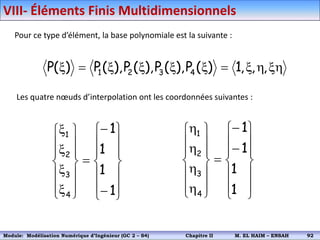
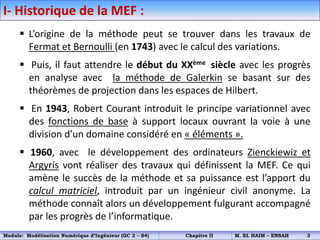
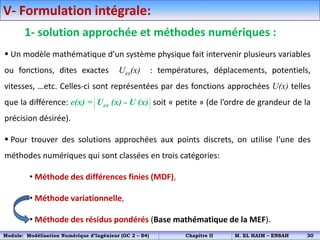
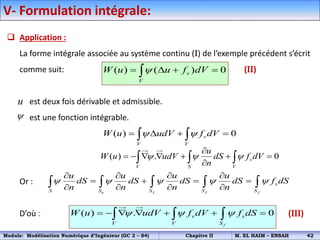
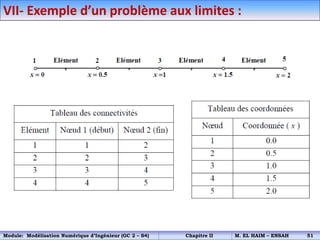
![Cette transformation e vérifie-t-elle les trois conditions?
les nœuds 1,2,3 de l’élément de référence se transforment en nœuds Xi , Xj , Xk de l’élément
réel Ve .
le segment [2,3] a pour équation:
Donc [2,3] se transforme en [j,k]
bijectivité: Il faut que la Jacobienne soit régulière;
(triangle réel)
1 0
x h
(1 )
(1 )
j k
j k
x x x
y y y
x x
x x
, ,
, ,
j k j k
k j k j
x x y y
x y
J
x x y y
x y
x x
h h
2 0
Det J Aires
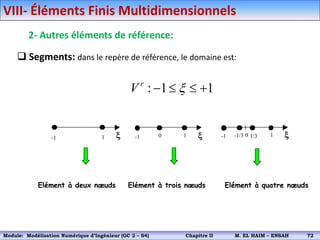
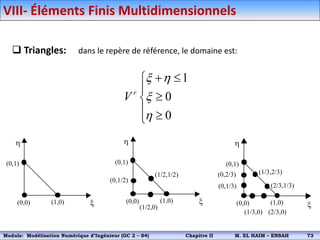
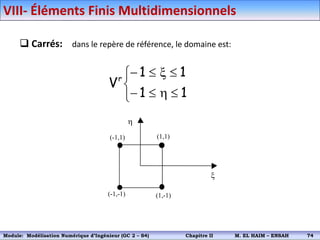
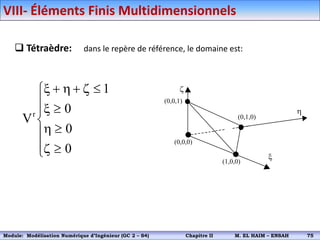
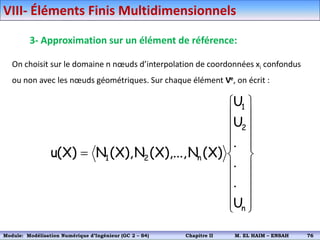
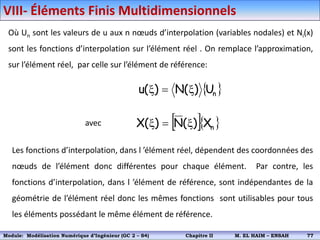
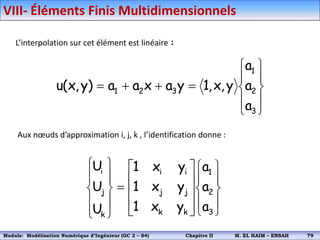
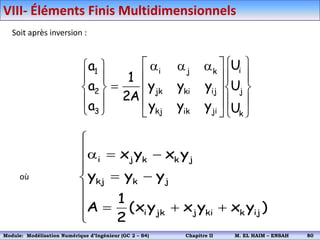
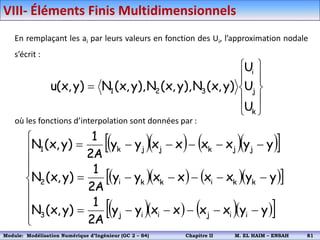
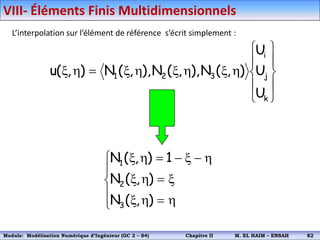
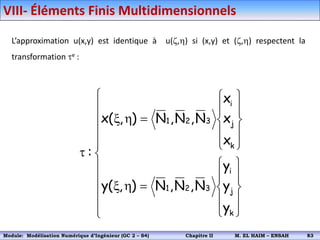
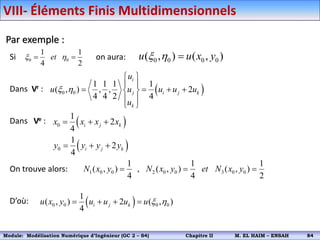
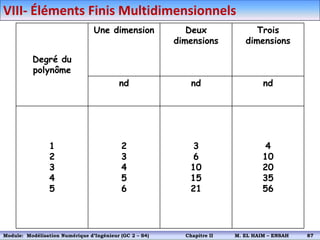
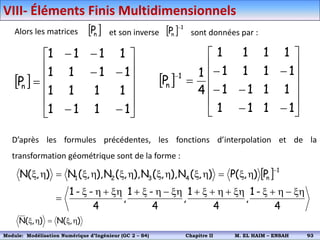
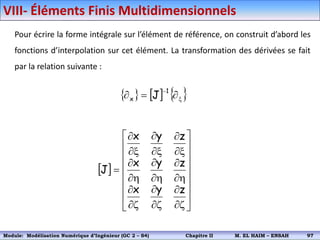
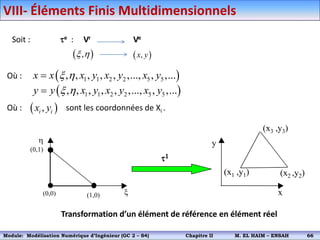
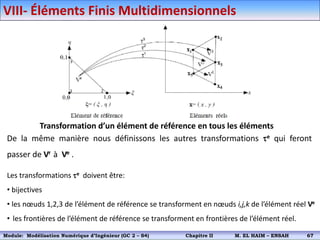
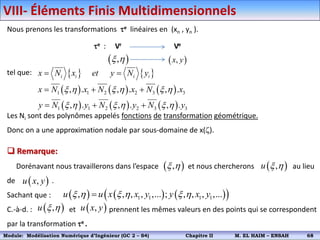
VIII- Éléments Finis Multidimensionnels
Module: Modélisation Numérique 2 (GEER 2 – S3) Chapitre II M. EL HAIM – ENSAH 74
Module: Modélisation Numérique d’Ingénieur (GC 2 – S4) Chapitre II M. EL HAIM – ENSAH 71](https://image.slidesharecdn.com/24032022075339668574813012-220522055805-1a772ac0/85/24032022075339668574813012-pdf-75-320.jpg)