Téléchargé 174 fois

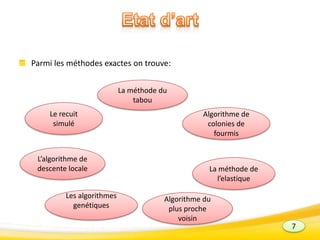
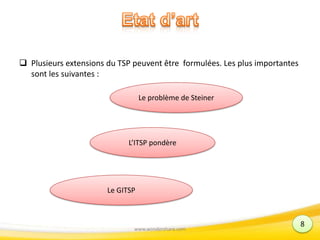



Cette documentation traite de la résolution du problème du voyageur de commerce en utilisant une approche multi-agent, visant à optimiser les coûts de transport d'une société. Elle explique les différentes méthodes de modélisation et de résolution, y compris la programmation dynamique et des heuristiques, ainsi que les types d'agents dans un système multi-agent. La conclusion souligne l'importance de l'optimisation dans ce problème NP-complet et propose des perspectives pour l'amélioration des temps d'exécution et des applications futures.











![[232] 성능어디까지쥐어짜봤니 송태웅](https://cdn.slidesharecdn.com/ss_thumbnails/232-161025013504-thumbnail.jpg?width=640&height=640&fit=bounds)




![[2019] 바르게, 빠르게! Reactive를 품은 Spring Kafka](https://cdn.slidesharecdn.com/ss_thumbnails/nhnforward20198-200121085520-thumbnail.jpg?width=640&height=640&fit=bounds)

















































